Room map building method and device for floor sweeping robot
A sweeping robot and map creation technology, which is applied in the field of sweeping robots, can solve problems such as reducing the working efficiency of sweeping robots, not being able to satisfy cleaning, and inaccurate room maps, etc., achieving strong usability and practicability, convenient operation, and simple implementation Effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
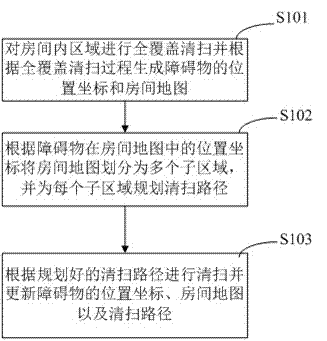
[0025] see figure 1 , figure 1 It is a schematic flowchart of a method for creating a room map of a sweeping robot provided in Embodiment 1 of the present invention. As shown in the figure, the method may include the following steps:
[0026] Step S101, perform full-coverage cleaning on the area in the room and generate position coordinates of obstacles and a room map according to the full-coverage cleaning process.
[0027] In the embodiment of the present invention, the sweeping robot is set to perform full-coverage cleaning when sweeping the floor for the first time. The full-coverage cleaning means that the sweeping robot cleans the room according to a certain trajectory until the sweeping robot records that it has traversed the room. Every corner of the cleaning. You can set a button on the sweeping robot to clear the recorded room map. When the room map is cleared, it will perform full-coverage cleaning. This can be applied to when a sweeping robot is changed to a cle...
Embodiment 2
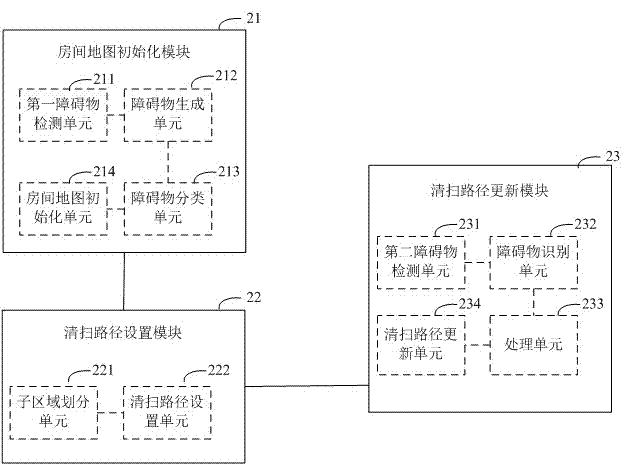
[0058] see figure 2 , figure 2 It is a schematic block diagram of the device for creating a room map of a sweeping robot provided in Embodiment 2 of the present invention. For the convenience of description, only the parts related to the embodiment of the present invention are shown.
[0059] The device for creating a room map of the sweeping robot may be a software unit, a hardware unit, or a combination of hardware and software built into the sweeping robot, or it may be integrated into the sweeping robot as an independent pendant.
[0060] The device for creating a room map of the sweeping robot includes:
[0061] The room map initialization module 21 is used to perform full-coverage cleaning on the area in the room and generate position coordinates and room maps of obstacles according to the full-coverage cleaning process;
[0062] The cleaning path setting module 22 is used to divide the room map into multiple sub-areas according to the position coordinates of obstacl...
Embodiment 3
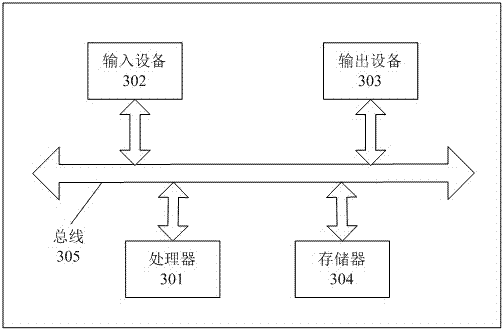
[0085] see image 3 , image 3 It is a schematic block diagram of the device for creating a room map of a sweeping robot provided in Embodiment 3 of the present invention. The sweeping robot room map creation device as shown in the figure may include: one or more processors 301 ( image 3 only one is shown); one or more input devices 302 ( image 3 only one is shown), one or more output devices 303 ( image 3 only one shown in ) and memory 304 . The aforementioned processor 301 , input device 302 , output device 303 and memory 304 are connected through a bus 305 . The memory 304 is used to store instructions, and the processor 301 is used to execute the instructions stored in the memory 304 . in:
[0086] The processor 301 is used to generate the position coordinates and room map of obstacles according to the full-coverage cleaning process when the sweeping robot performs full-coverage cleaning on the room area; The position coordinates divide the room map into multiple...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com