


Quick Research
Generate reliable direction feasibility study reports for your R&D in just a few steps.

Technical Q&A
Discover and master advanced knowledge NOW. Basics, ideas, possibilities, all at once.

Find Solutions
As an expert in R&D theories, this can generate solutions to your technical problems instantly.

Evaluate Feasibility
Analyze your overall solution with one click, know your potential R&D risks in advance.

Monitor Landscape
Get weekly tech updates, stay abreast of the latest tech innovations and key insights.
Automatic charging apparatus and charging control method for unmanned aerial vehicle
A technology of autonomous charging and control methods, applied in the direction of circuit devices, battery circuit devices, collectors, etc., can solve the problems of poor battery life, high inspection costs, and manual work, so as to avoid manual assistance, improve efficiency, The effect of expanding the scope of the area
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
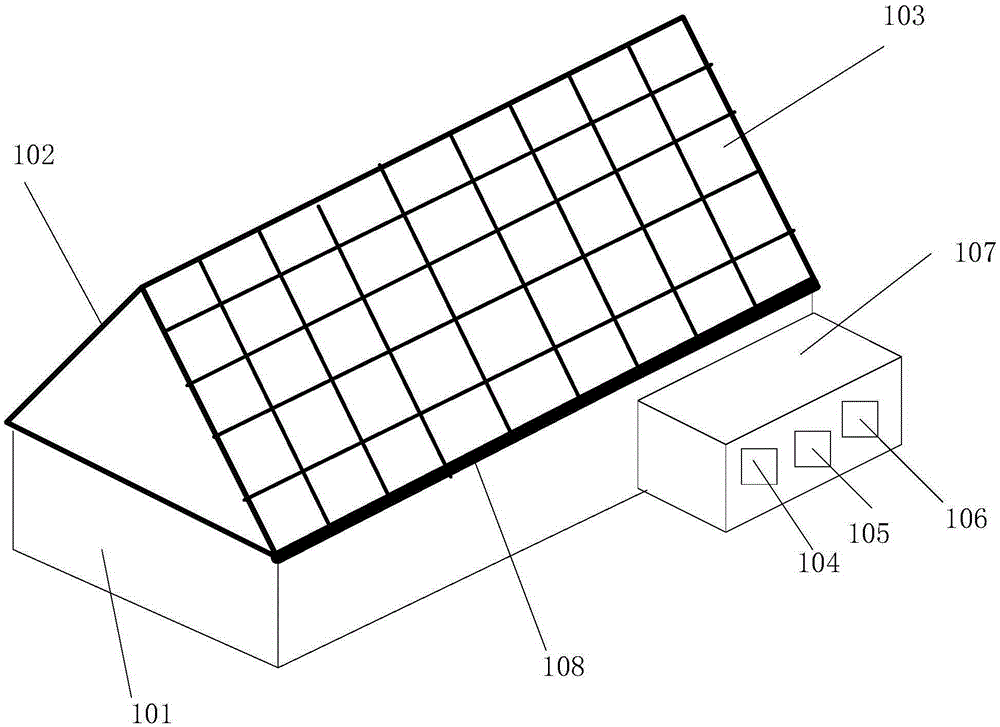
[0021] refer to figure 1 , the present embodiment provides a drone autonomous charging device, including:
[0022] Housing 101, the inside of the housing 101 is used to park the drone;
[0023] The first solar panel 102 and the second solar panel 103 arranged on the top of the housing 101 are used to convert solar energy into electrical energy;
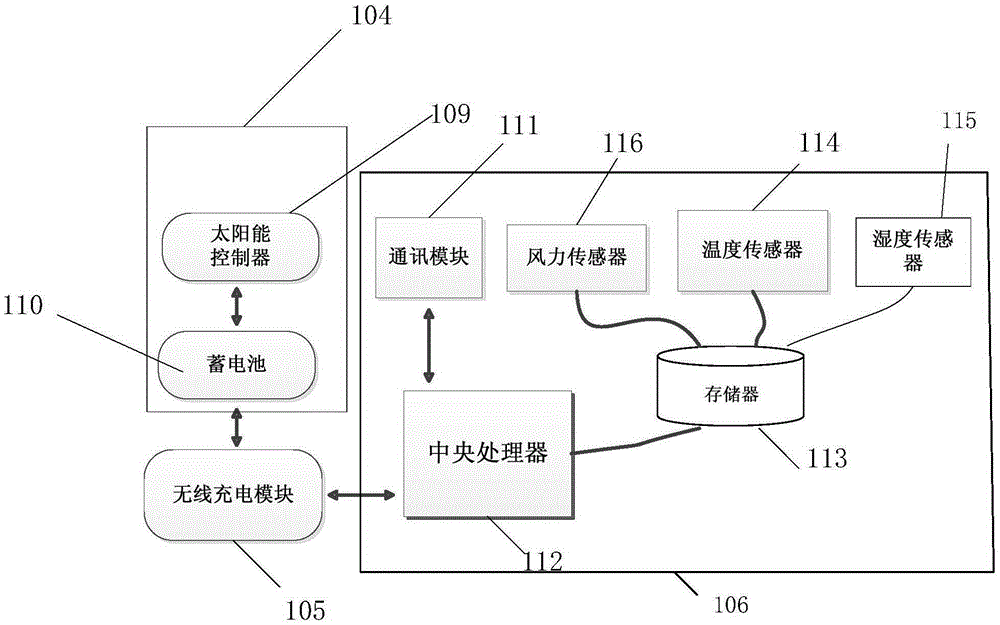
[0024] An energy storage module 104, configured to store the converted electric energy;
[0025] The wireless charging module 105 is connected with the energy storage module 104 for charging the drone;
[0026] The control module 106 is configured to obtain charging request information sent by the drone, and generate a charging control signal according to the charging request information, and the charging control signal is used to control the wireless charging module to charge the drone.
[0027] The UAV autonomous charging device provided by this embodiment makes up for the disadvantage that UAVs cannot inspect remote areas due to...
Embodiment 2
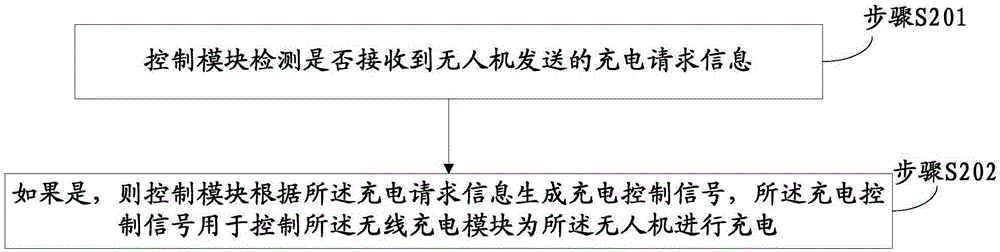
[0044] refer to image 3 , the present embodiment provides a method for controlling the autonomous charging of the UAV, using the UAV autonomous charging device described in Embodiment 1 to charge the UAV, the method includes:
[0045] Step S201, the control module detects whether the charging request information sent by the drone is received;
[0046] Step S202, if yes, the control module generates a charging control signal according to the charging request information, and the charging control signal is used to control the wireless charging module to charge the drone.
[0047] Please refer to Embodiment 1 for the specific structure and working principle of the drone's autonomous charging device, and details will not be repeated here.
[0048] Further, one side of the first solar cell panel and the second solar cell panel are docked, and the other side is respectively fixedly connected to the housing, and the drone autonomous charging device also includes an opening and clos...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D Engineer
- R&D Manager
- IP Professional
- Industry Leading Data Capabilities
- Powerful AI technology
- Patent DNA Extraction
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2024 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com