Kinetic modeling method and device for rotor unmanned aerial vehicle
A dynamic modeling and unmanned rotor technology, applied in the field of UAVs, can solve the problems of low simulation accuracy and inability to accurately express the dynamic characteristics of rotor UAVs, and achieve the effect of reducing correlation and improving accuracy
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment 1
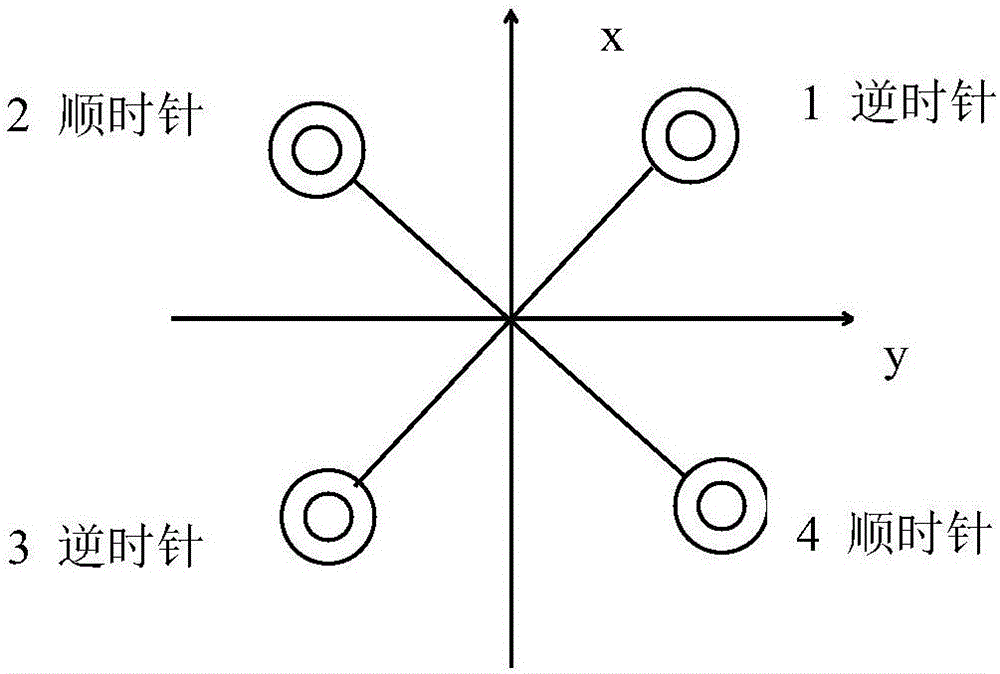
[0039] Such as figure 1 As shown, the present embodiment provides a dynamic modeling method of a rotor UAV, the method comprising:
[0040] Step 101, acquiring the flight data of the rotor drone.
[0041] Flight data refers to various parameters of the rotor UAV during flight, including but not limited to the mass, moment of inertia, center of gravity, propeller lift, Euler angle, angular velocity, etc. of the rotor UAV. Flight data mainly includes direct acquisition and offline acquisition. The so-called direct acquisition refers to the data that can be read directly during the flight; the so-called offline acquisition includes the relationship query corresponding to the pre-built relationship, and also includes the measurement of some basic physical data, such as distance, quality and other data. In a specific embodiment, the flight data may include but not limited to the linear displacement of the rotor drone, the mass of the rotor drone, the total lift of the propellers,...
Embodiment 2
[0079] The flight of the rotor UAV is simulated under the condition of considering the influence of the disturbance of the wind field, and the same assumption and coordinate system as in Embodiment 1 are adopted.
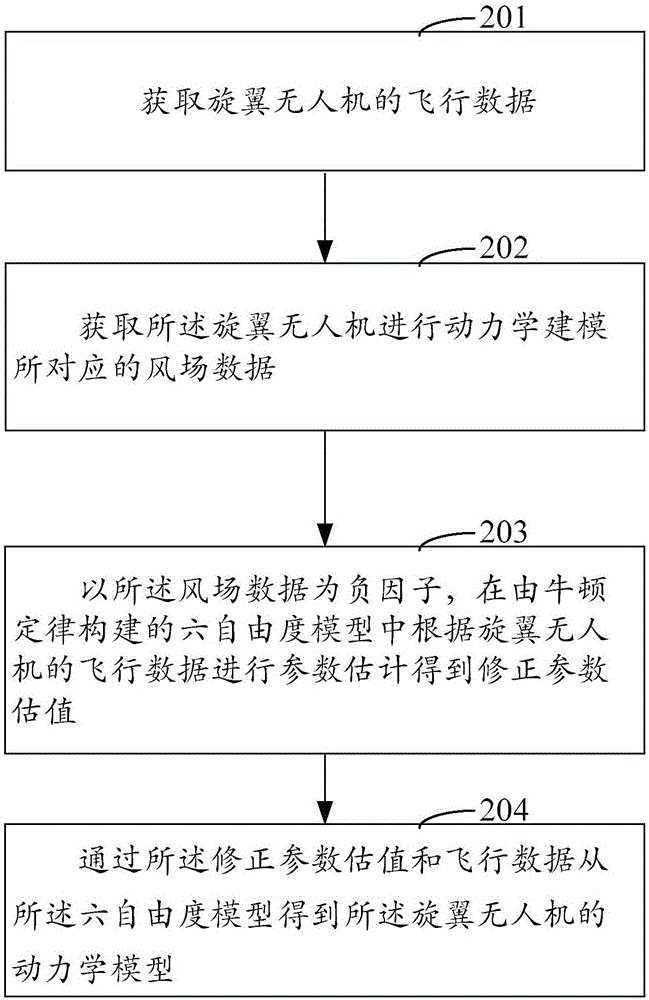
[0080] Such as image 3 As shown, the present embodiment provides a dynamic modeling method of a rotor UAV, and the simulation method includes:
[0081] Step 201, acquiring the flight data of the rotor drone.
[0082] The flight data acquisition method is the same as that in Embodiment 1.
[0083] Step 202, acquiring the wind field data corresponding to the dynamic modeling of the rotor UAV.
[0084] The wind field data refers to the relative speed of the rotor UAV on the coordinate axis relative to the airflow with the rotor UAV as the center. Specifically, the speed of the rotor UAV relative to the airflow is obtained offline. There is a one-to-one correspondence between the wind field data and the flying coordinates of the rotor UAV, and there is a correspondin...
Embodiment 3
[0181] This embodiment also provides a dynamic modeling device for a rotorcraft, which can be used to implement the method described in any one of the above-mentioned embodiment 1 and embodiment 2. Such as Figure 4 As shown, the device includes: a flight data acquisition module 301 , a correction parameter estimation module 302 and a dynamics modeling module 303 .
[0182] The flight data acquisition module 301 is used to obtain the flight data of the rotor UAV; the correction parameter estimation module 302 is used to perform parameter estimation according to the flight data of the rotor UAV, and obtains the six degrees of freedom of the rotor UAV constructed by Newton's law. Correction parameter estimation in the model; the dynamics modeling module 303 is used to obtain the dynamics model of the rotor UAV from the six-degree-of-freedom model through correction parameter estimation and flight data.
[0183] The flight data includes the pulse width modulation value output by...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - Generate Ideas
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com