Robot ranging system based on FBG bionic whisker sensor and method thereof
The technology of a distance measuring system and a distance measuring method, which is applied in the field of distance measuring sensors, can solve the problems of anti-electromagnetic interference, low reliability, and high cost, and achieve the effects of small environmental impact, strong reliability, and simple use
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
[0052] As introduced in the background technology, the existing robot ranging systems and ranging sensors in the prior art are greatly affected by the environment, have high cost, cannot be reused many times, are complicated to manufacture and use, have low reliability, and are resistant to electromagnetic interference. problems, especially the inability to measure distances to obstacles of arbitrary shape.
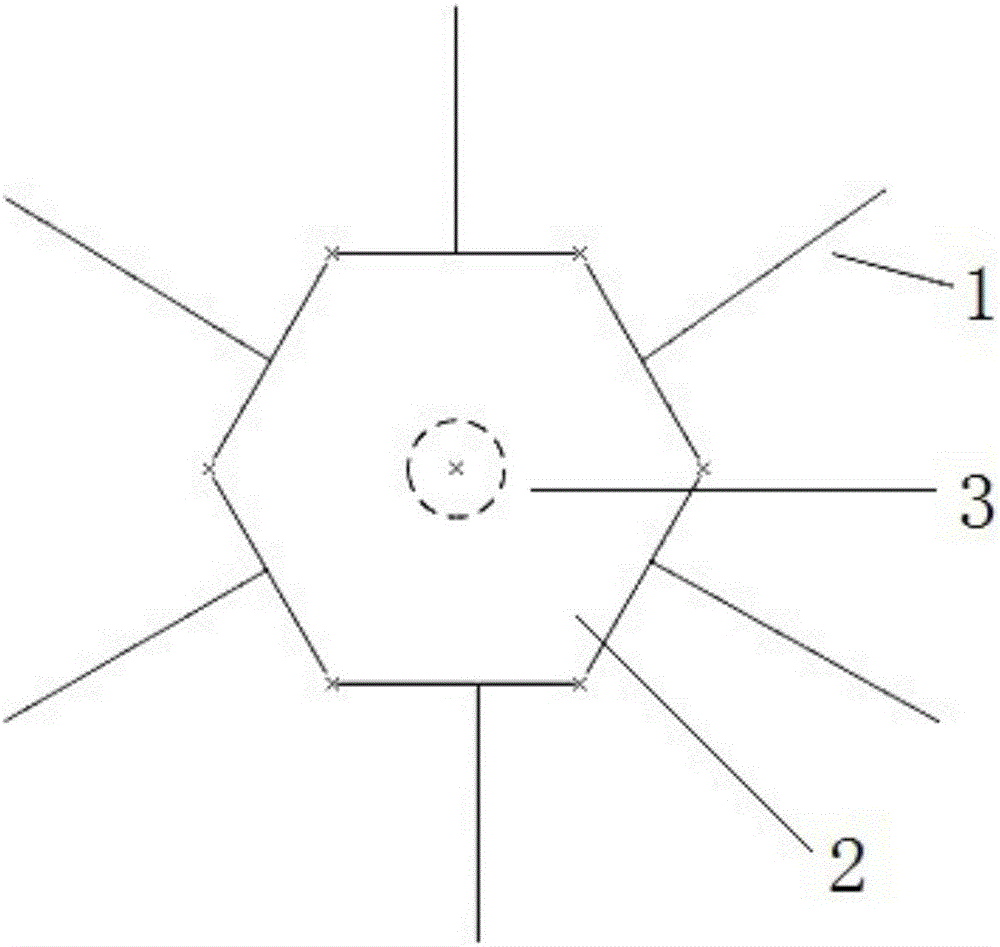
[0053] In a typical implementation of the present application, a robot ranging system based on the FBG bionic whisker sensor is provided, such as figure 1 As shown, the system includes a bionic whisker sensor 1, a bottom base 2, a motor 3 and a demodulator. In this embodiment, the bottom base 2 adopts a hollow hexagonal prism, and the center positions of the six outer surfaces of the hollow hexagonal prism are Each bionic whisker sensor 1 is provided, and the bionic whisker sensor 1 is perpendicular to the side surface of the hollow hexagonal prism to which it is connecte...
Embodiment 2
[0067] As introduced in the background technology, the existing robot ranging systems and ranging sensors in the prior art are greatly affected by the environment, have high cost, cannot be reused many times, are complicated to manufacture and use, have low reliability, and are resistant to electromagnetic interference. problems, especially the inability to measure distances to obstacles of arbitrary shape.
[0068] In a typical implementation of the present application, a ranging method of a robot ranging system based on an FBG bionic whisker sensor is provided, which is applied to a robot ranging system based on an FBG bionic whisker sensor, and the method includes the following step:
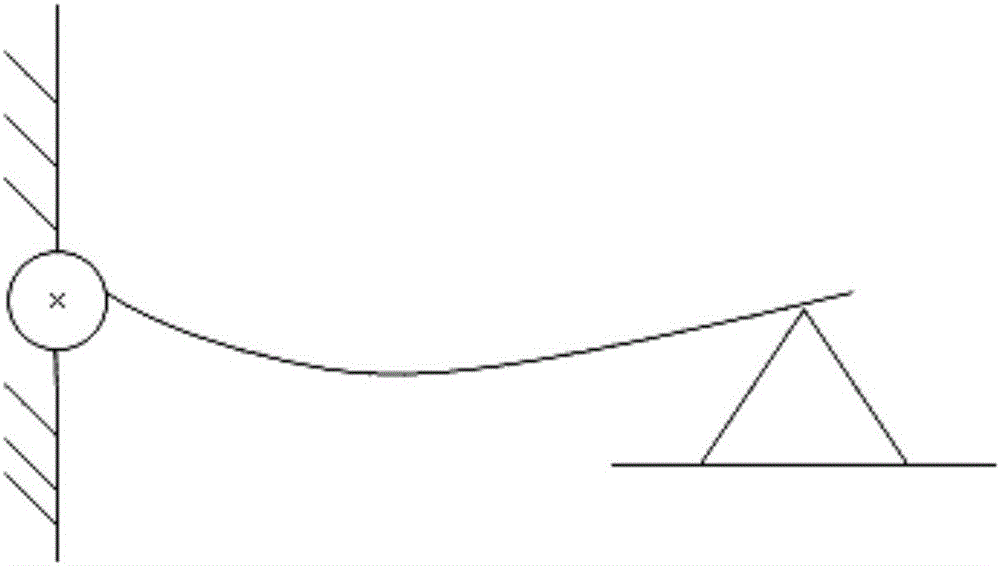
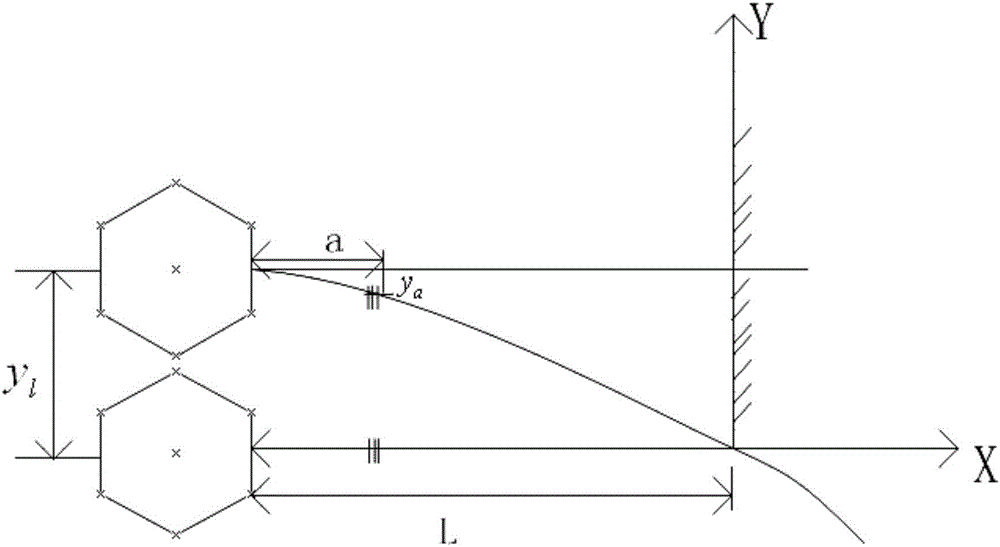
[0069] (1) During the moving process of the robot, the motor is used to rotate to drive the bionic whisker sensor to rotate for scanning sensing. When the robot encounters an obstacle during the moving process, the motor stops moving, and the bionic whisker sensor bends , the wavelength of t...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - Generate Ideas
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com