A control method for in-wheel motor-driven vehicles based on a self-tuning particle model
An in-wheel motor and self-adjustment technology, applied in the direction of adaptive control, general control system, control/regulation system, etc., can solve the problem of unreasonable vehicle dynamics state value, loss of vehicle driving trajectory controllability, and inability to truly reflect dynamics characteristics and other issues to achieve the effect of ensuring handling stability and driving safety
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0029] The present invention takes the vehicle as a whole as the research object, so each acceleration in the present invention refers to the acceleration of the vehicle.
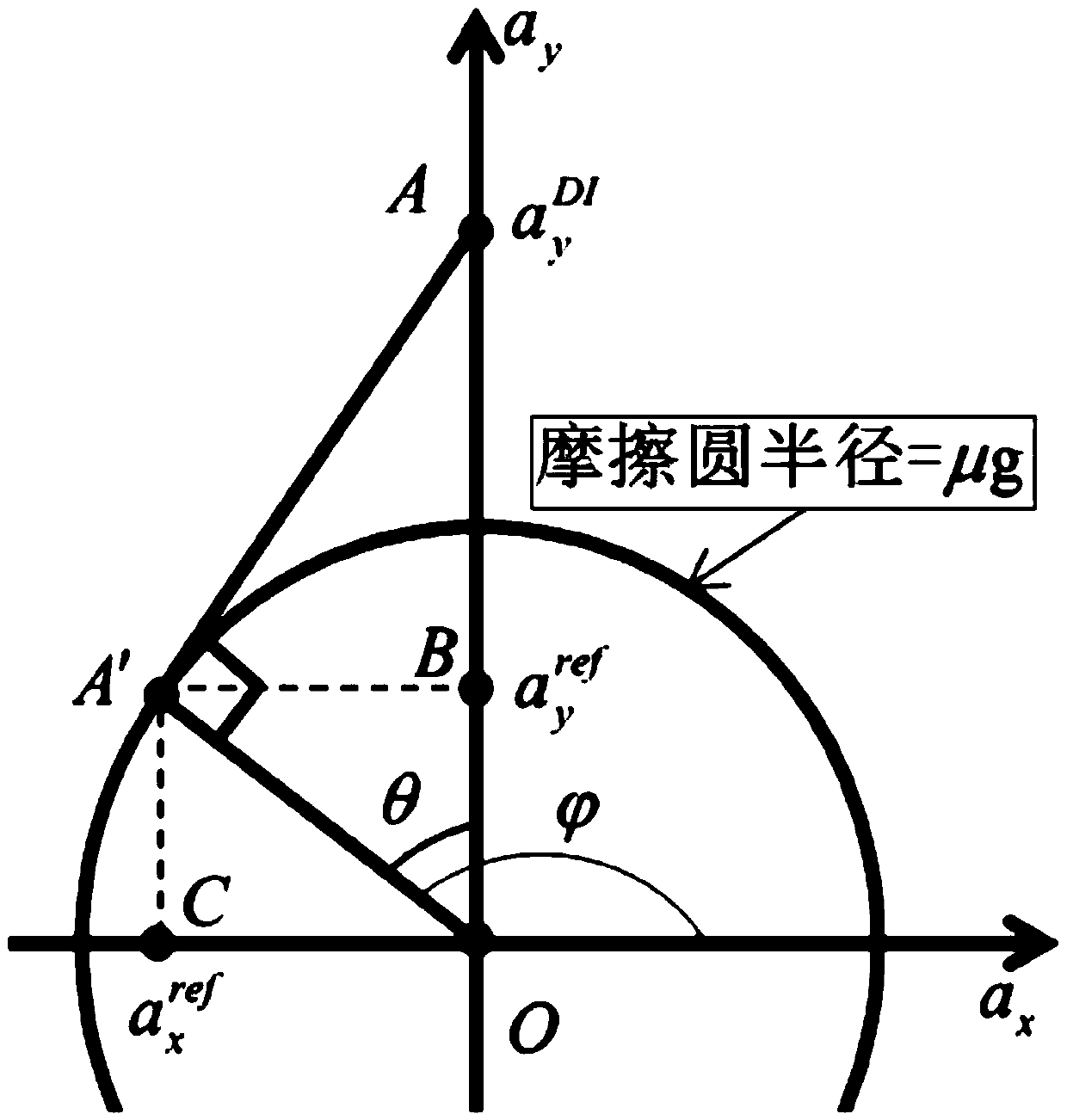
[0030] As we all know, if tires are taken as a research object, the grip force of the tires has a limit during the steering process of the vehicle. Although the total amount of grip force is limited, there is no limit on how to distribute it. It can be allocated to both acceleration and steering, or deceleration and steering. Steering is then known to use the friction circle to describe the amount and distribution of tire grip. Since the present invention regards the vehicle as a whole as the research object, the vehicle friction circle is proposed by using the above-mentioned concept of tire friction circle to describe the amount and distribution of the overall grip force of the vehicle.
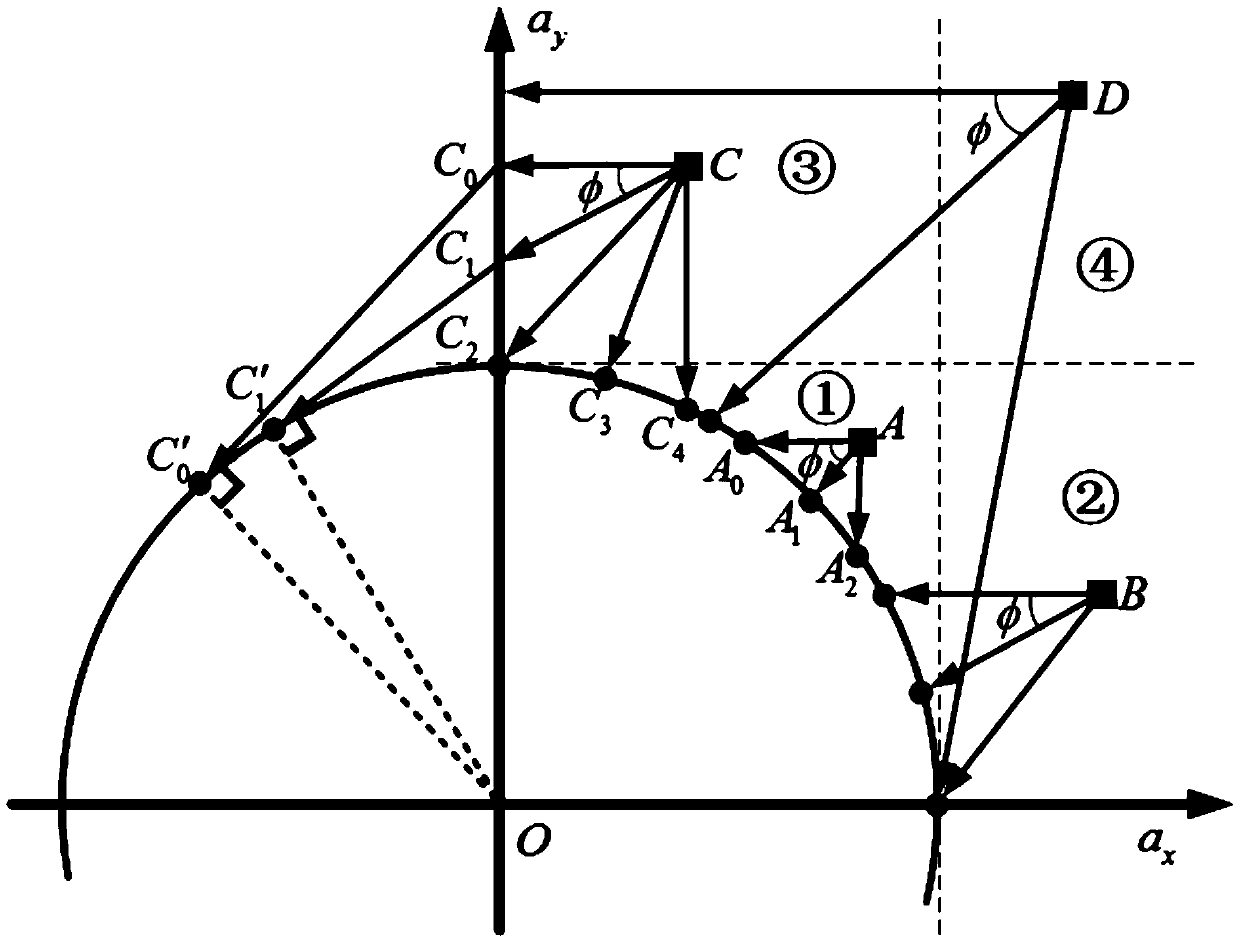
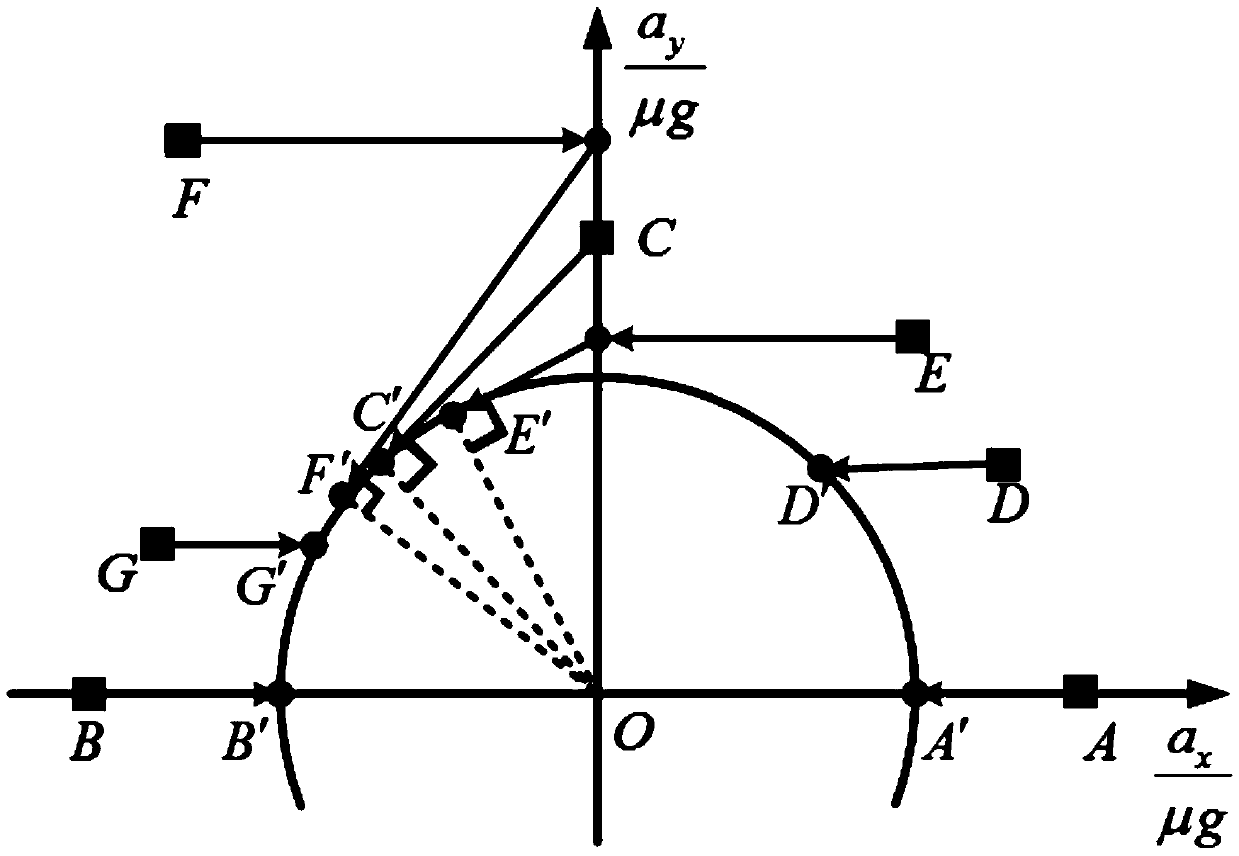
[0031] In the present invention, in the self-adjusting particle model, the included angle between the ray and the absc...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com