Combined agricultural robot navigation information fusion method based on rank filtering
A technology of integrated navigation and fusion method, which is applied in the field of information fusion of integrated navigation of agricultural robots based on rank filter
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment
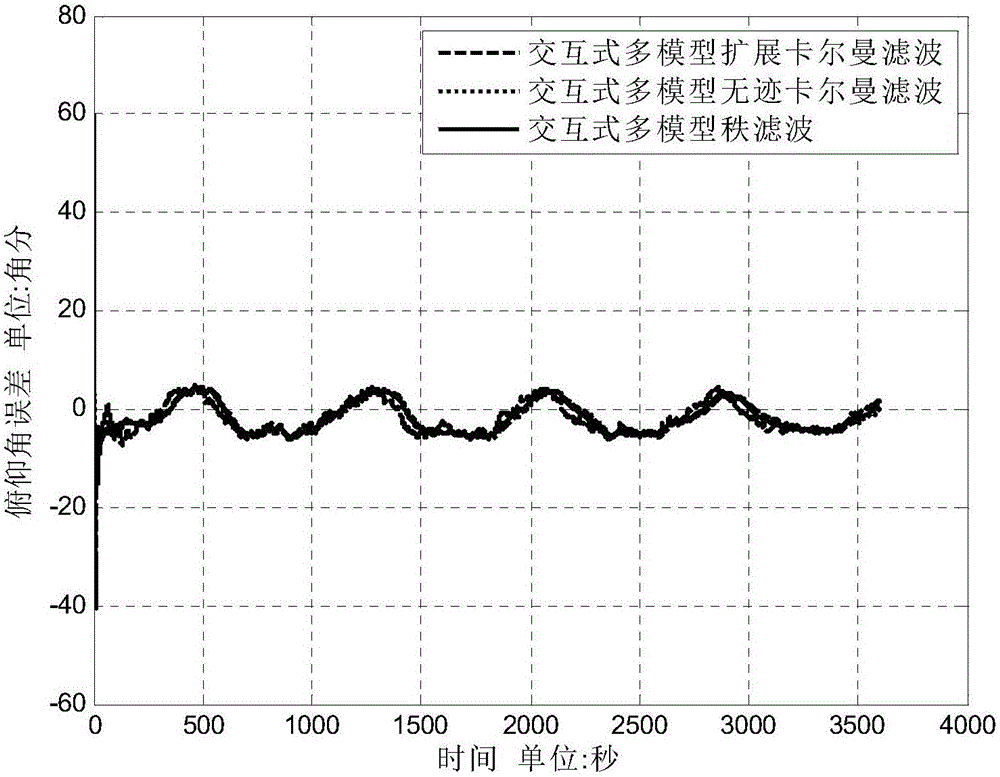
[0112] For verifying the feasibility of the present invention, emulation is carried out under Matlab, and filtering initial value and emulation parameter are set as follows:
[0113] The random constant drift of the gyro is 1° / h, and the random drift of white noise is 0.1° / h;
[0114] Accelerometer bias error is 1mg, white noise random drift is 0.1mg;
[0115] The MEMS strapdown inertial navigation system has an initial horizontal attitude angle error of 1° and a heading angle error of 3°;
[0116] The initial speed is 0m / s, and the initial speed error is 0m / s;
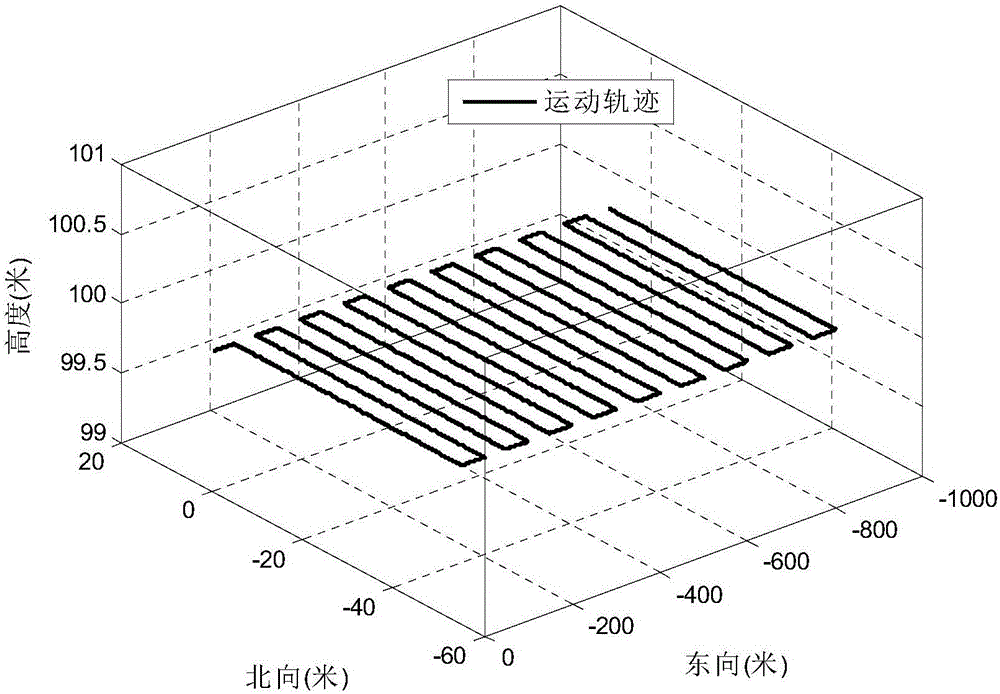
[0117] The initial position is 118° east longitude, 32° north latitude, 100m in altitude, and the initial position error is 0m;
[0118] RTK GPS position measurement accuracy is 0.1 meters;
[0119] MEMS strapdown inertial navigation system sampling period is 1ms, RTK GPS sampling period is 0.1s;
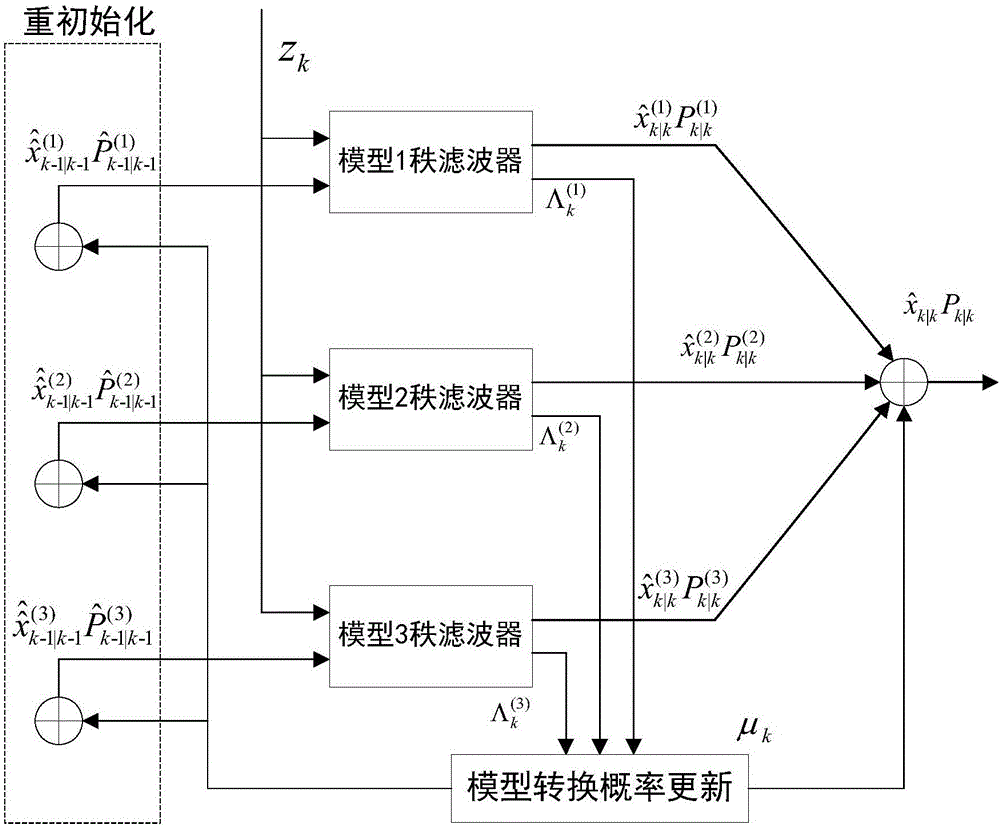
[0120] Maximum land unevenness level Maximum satellite signal fading level ξ max = 1, then the model number r in t...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - Generate Ideas
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com