Robot capable of washing outer wall across obstacle and operating method
A technology for cleaning exterior walls and crossing obstacles, which is applied in the direction of cleaning machinery, machine parts, manipulators, etc. It can solve the problems of application limitations, complicated operation, bulky and heavy structure, etc., and achieve convenient installation and operation, light weight of equipment, and flexible operation Effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
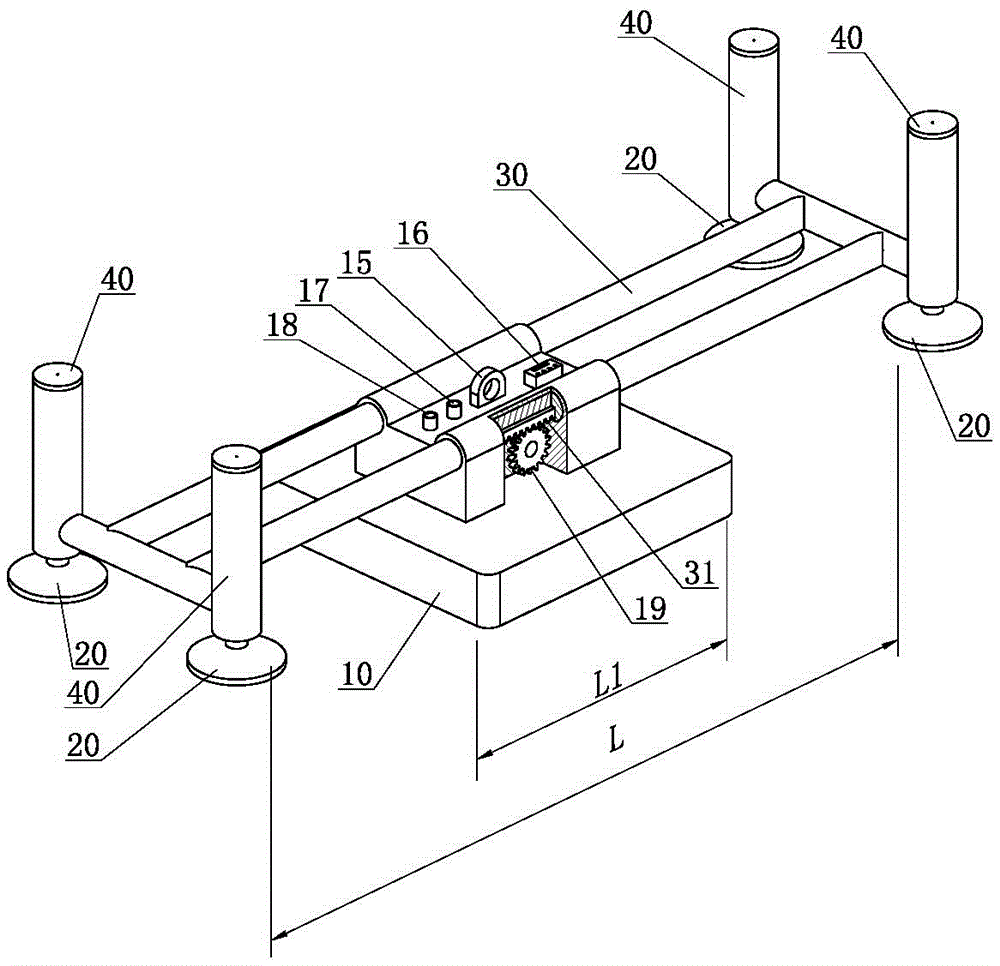
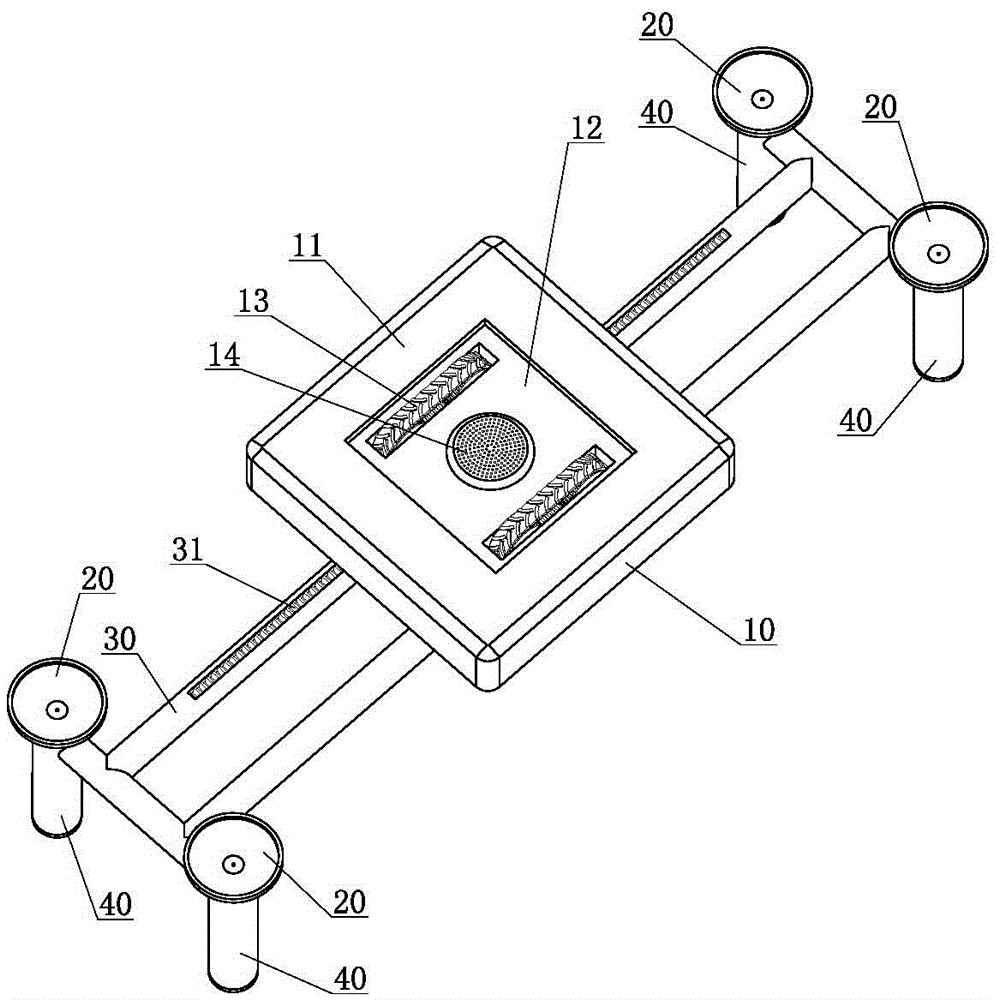
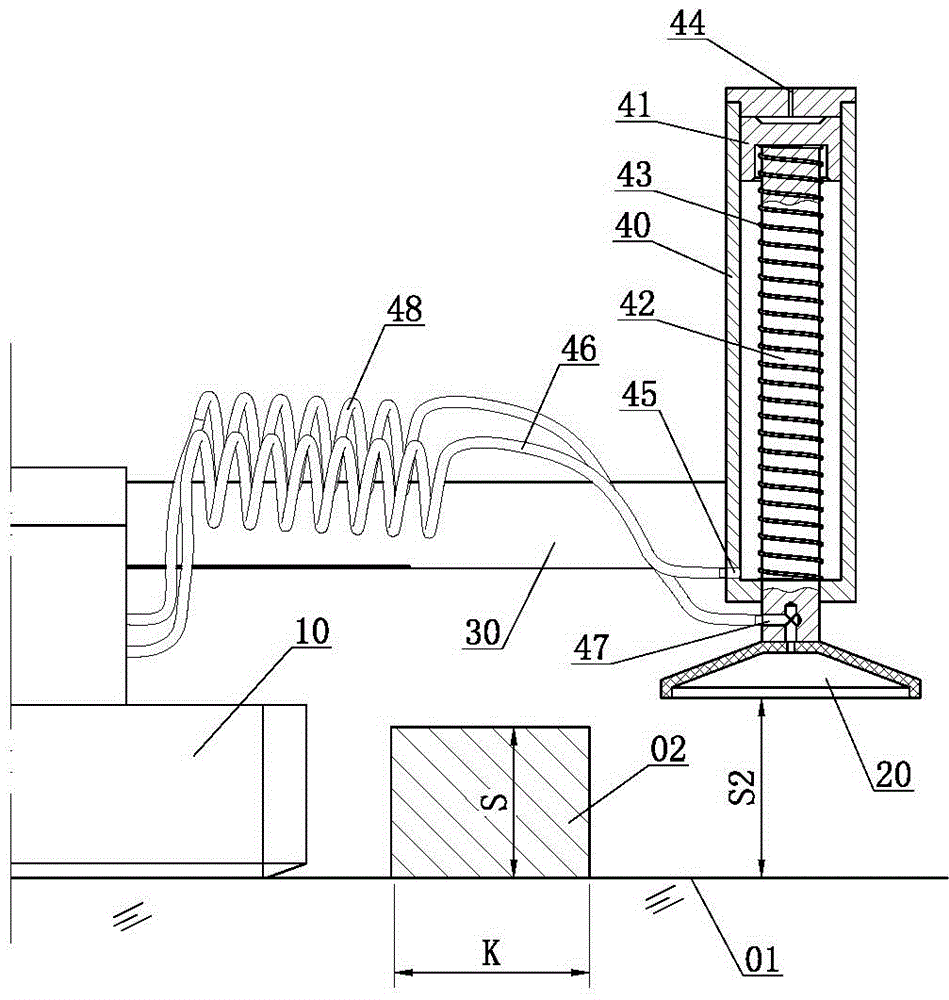
[0052] like Figure 1 to Figure 5 , an obstacle-crossing exterior wall cleaning robot, the obstacle-crossing exterior wall cleaning robot is a cleaning robot that crosses a raised obstacle 02 on a working surface, and includes a robot body 10 . The bottom surface 11 of the robot body is provided with a vacuum suction groove 12 that absorbs the robot body on the working surface 01. The bottom surface of the robot body is also provided with walking crawlers 13. There are two walking crawlers to drive the robot body to walk and turn. The walking crawlers are The crawler belt with herringbone pattern is provided with vacuum suction port 14 in the vacuum suction groove. A vacuum pump (not shown in the figure) is arranged in the robot body. The vacuum pump provides a vacuum source for the vacuum suction groove, so that the robot body can be adsorbed on the working surface. The robot body is also provided with a walking motor (not shown) that drives the walking crawler to run. The...
Embodiment 2
[0066] like Image 6 , a method of operating a robot for cleaning exterior walls across obstacles. The glass curtain wall cleaning robot is the obstacle-crossing exterior wall cleaning robot described in Embodiment 1, and the working surface 01 is a glass curtain wall. The working surface is provided with a raised obstacle 02, which is the structural frame of the glass curtain wall.
[0067] When the obstacle-crossing outer wall cleaning robot is working, an auxiliary trolley 60 is provided on the roof of the building, and the auxiliary trolley can walk along the edge of the wall. The auxiliary trolley is provided with a boom 61, and a pulley 62 is provided on the boom. The auxiliary trolley is equipped with cleaning fluid, and the auxiliary trolley is also equipped with a liquid pump and an air pump for pressurizing the cleaning fluid. The air pump is used to pressurize the hot air for drying the working surface. The auxiliary trolley is also provided with a power supply fo...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com