Inspection robot path planning method combining map grid with potential field method obstacle avoidance
An inspection robot and path planning technology, which is applied to instruments, two-dimensional position/channel control, vehicle position/route/height control, etc., can solve the problems of prolonged robot inspection time, low path planning efficiency, etc. The effect of completing efficiency, improving effectiveness, and short path distance
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
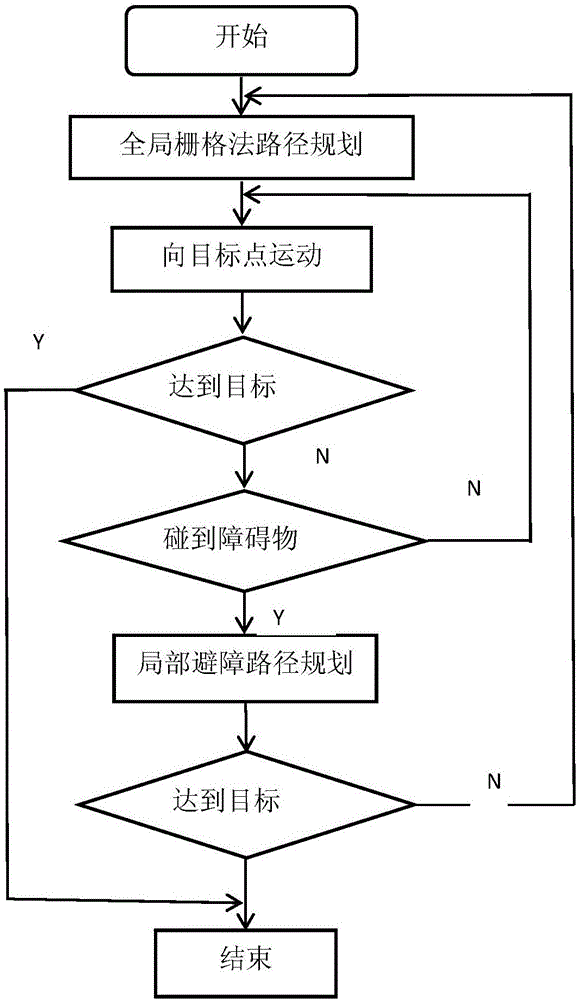
[0068] combine figure 1 , figure 1 It is an overall flowchart of the present invention. Firstly, the global path planning is carried out, and a global optimal path from the starting point to the target point is obtained by using the grid method; according to this optimal path, move to the target point, judge whether there is an obstacle, if not, continue to move to the target point, Otherwise, carry out local obstacle avoidance path planning; local obstacle avoidance path planning, use the artificial potential field method with variable parameters to plan obstacle avoidance path, judge whether to reach the target point, if not, continue to move towards the target point, otherwise end.
Embodiment 2
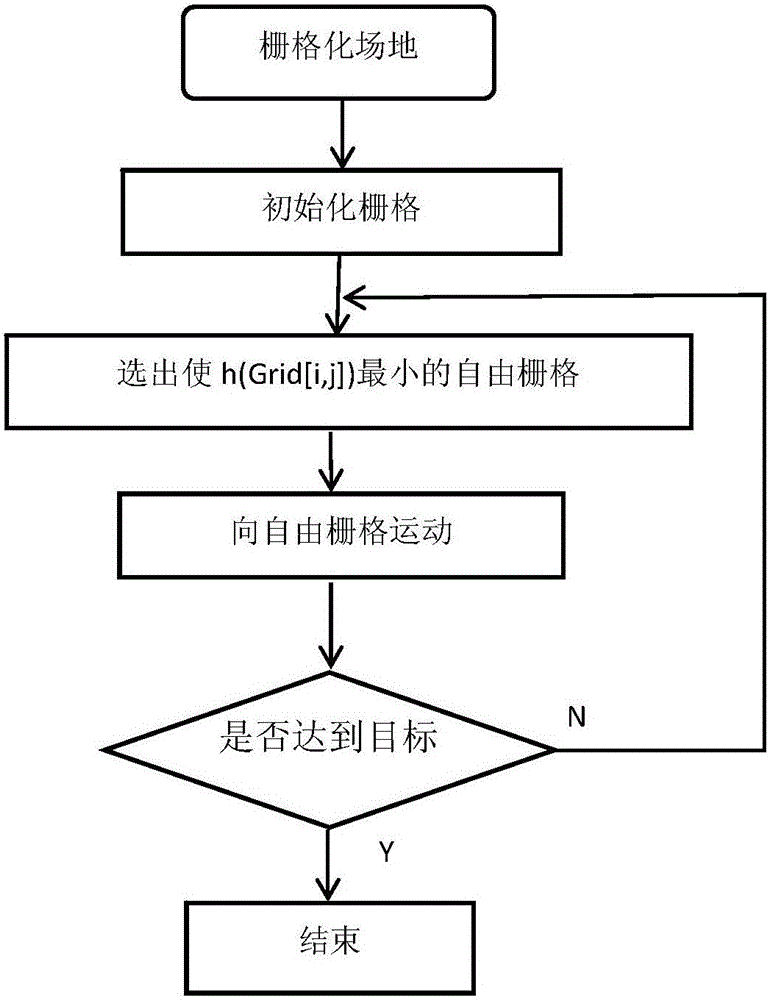
[0070] combine figure 2 , figure 2 It is a flow chart of the global path planning program of the present invention. First, grid the site, determine the target point, obstacle and the grid of the robot itself; initialize the grid, mark the grid with obstacles as 1, and mark the free grid as 0; search for the grid adjacent to the robot, and select From the free grid, define the evaluation function h(Grid[i,j]) to calculate the distance between the center point of this grid and the center point of the target grid: Grid[i,j] is the coordinates of the grid adjacent to the grid where the robot is located, and goal represents the grid coordinates of the target point; compare the h(Grid[i,j]) values of each grid, and select h(Grid [i,j]) the smallest grid Grid[i,j] min , will Grid[i,j] min The grid is the grid where the robot will move to in the next step; judge whether the robot reaches the target point, if not, continue to search the adjacent grid of the robot, if it arrive...
Embodiment 3
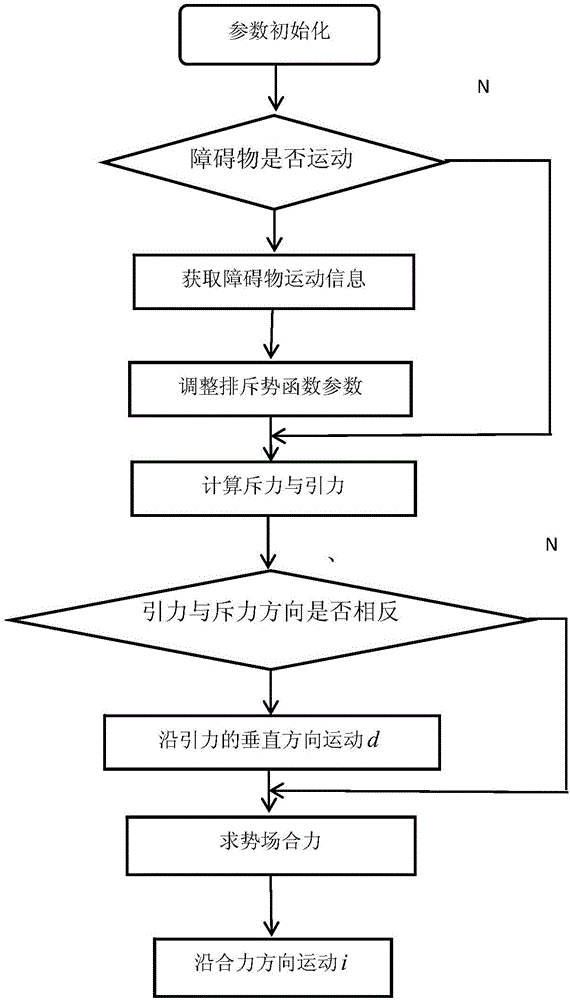
[0072] combine image 3 , image 3 It is a flow chart of the local obstacle avoidance path planning program of the present invention. First initialize the parameters of the potential field function, d1: the distance between the robot’s current position and the obstacle observed by the laser radar, k1: the repulsion weighting coefficient, temporarily set to 0.5, and adjust it according to the obstacle avoidance effect during the debugging process. d2: the distance between the position of the robot and the target point at this time, k2: the gravitational weighting coefficient, temporarily set to 0.5, and make specific adjustments according to the obstacle avoidance effect during the debugging process; then use the global laser radar sensor to judge the obstacles encountered Whether it is moving or not, then directly calculate the repulsive force and gravitational force according to the initialized parameters, otherwise, the motion vector of the obstacle and the position relativ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com