Wearable exoskeleton upper-limb rehabilitation robot
A rehabilitation robot and exoskeleton technology, applied in the field of rehabilitation robots, can solve problems such as secondary injuries of patients, unfavorable rehabilitation training of patients, and large differences in patient characteristics, so as to reduce weight, improve flexibility, and solve the problem of chain transmission or belt transmission. The effect of gear skipping phenomenon
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0027] Specific examples of the present invention are given below. The specific embodiments are only used to further describe the present invention in detail, and do not limit the protection scope of the claims of the present application.
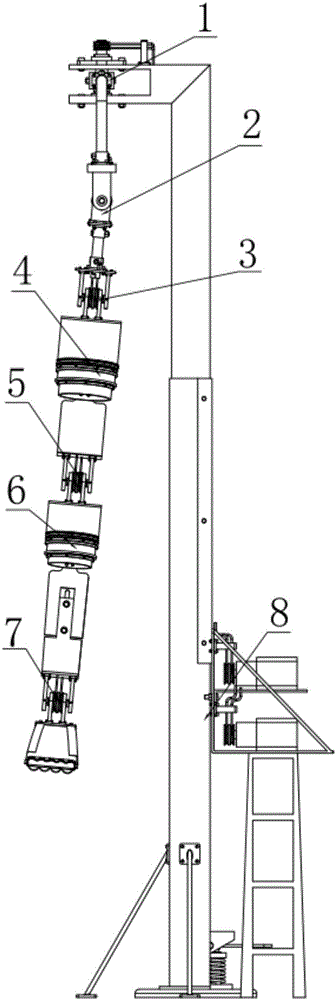
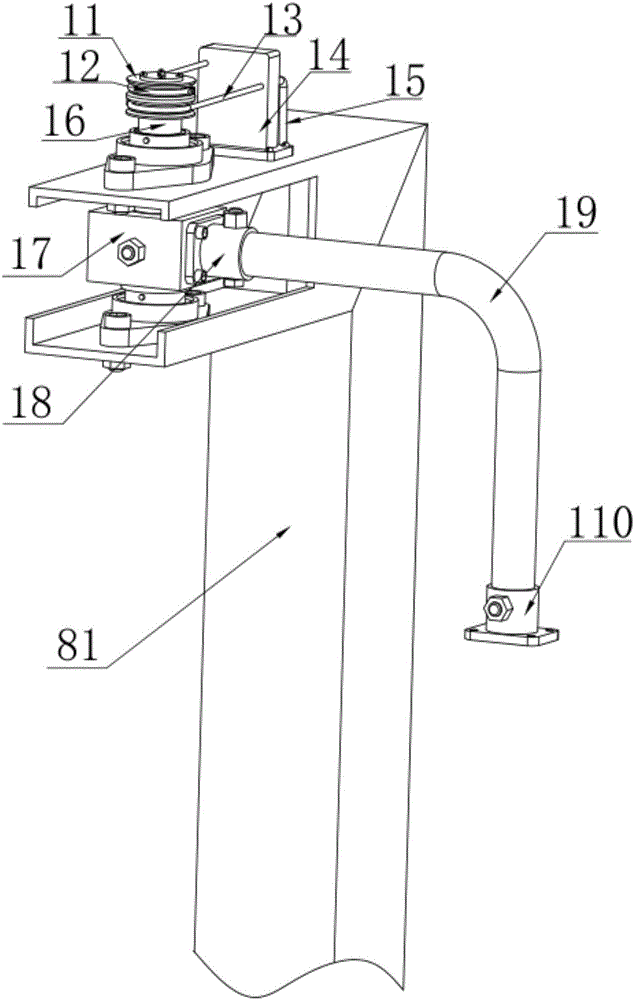
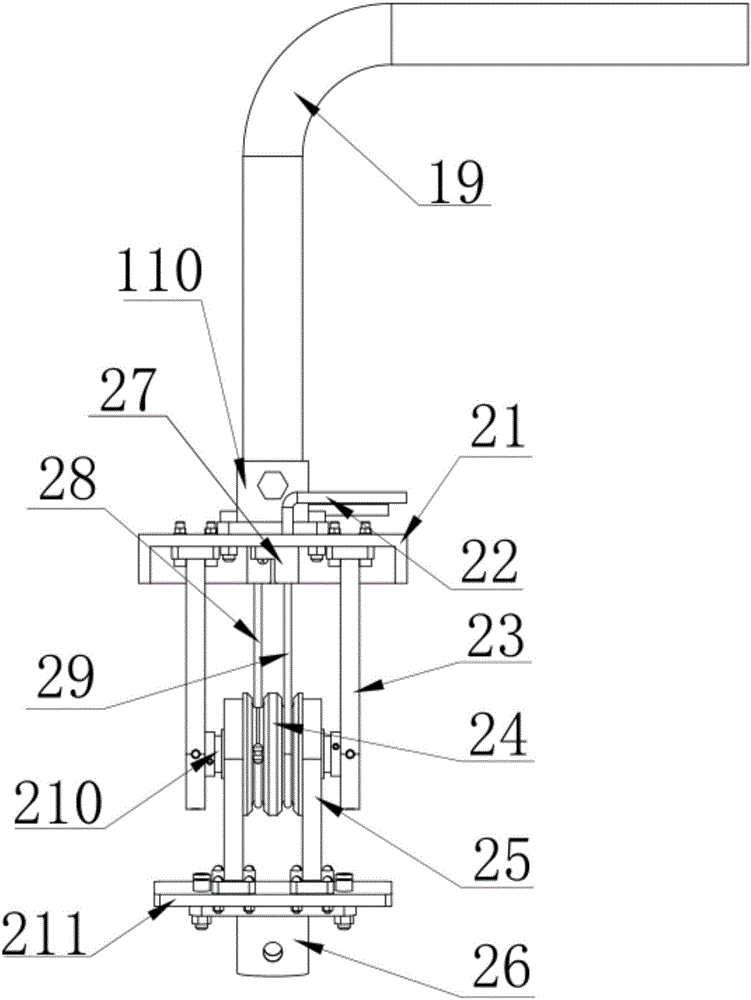
[0028] The invention provides a wearable exoskeleton upper limb rehabilitation robot (see Figure 1-9 , upper limb rehabilitation robot for short), including arm adjustment component 1, shoulder joint flexion and extension component 2, shoulder joint extension and retraction component 3, upper arm rotation movement component 4, elbow joint flexion and extension component 5, forearm rotation movement component 6, wrist joint flexion and extension component 7 and Frame motor assembly 8; the arm adjustment assembly 1 is fixed on the frame motor assembly 8; the arm adjustment assembly 1 is connected with the shoulder joint extension assembly 2; the shoulder joint extension assembly 2 is connected with the shoulder joint extension assembly 3 Th...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com