


Quick Research
Generate reliable direction feasibility study reports for your R&D in just a few steps.

Technical Q&A
Discover and master advanced knowledge NOW. Basics, ideas, possibilities, all at once.

Find Solutions
As an expert in R&D theories, this can generate solutions to your technical problems instantly.

Evaluate Feasibility
Analyze your overall solution with one click, know your potential R&D risks in advance.

Monitor Landscape
Get weekly tech updates, stay abreast of the latest tech innovations and key insights.
Connecting rod type variable freedom degree fodder stacking mechanical arm driven by servo motor
A servo motor and link-type technology, which is applied in the stacking of objects, de-stacking of objects, and conveyor objects, etc., can solve the problem of changing the degree of freedom mechanism of the feed palletizing manipulator, the influence of hydraulic oil temperature is large, and the Affect the quality of feed and other problems, and achieve the effect of overcoming high requirements for component accuracy, improving stability and reliability, and simplifying complexity.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
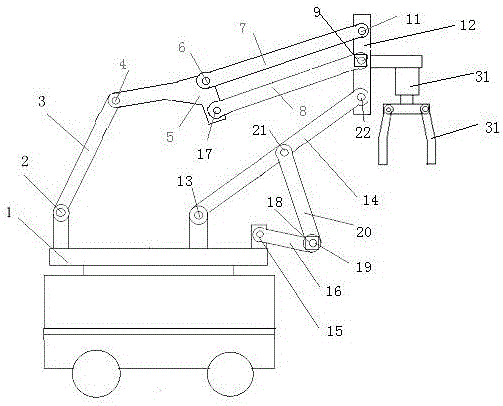
[0007] A link-type variable-degree-of-freedom feed palletizing manipulator driven by a servo motor, including a base 1, a boom lifting mechanism, a wrist link pitching mechanism, a wrist 31, a claw 32, a servo drive device, and a first locking device 9 and the second locking device 19; the base 1 is installed on a movable slewing platform; the boom lifting mechanism is composed of a boom 14 and a lifting mechanism, and the boom 14 is connected to the base through the seventh rotating pair 13 1, the fourth connecting rod 16 of the lifting mechanism is connected to the base 1 through the eighth rotating pair 15, the other end is connected to the fifth connecting rod 20 through the ninth rotating pair 18, and the other end of the fifth connecting rod 20 is connected through the The tenth rotation pair 21 is connected with the boom 14; the wrist link pitch mechanism is composed of the wrist link 12 and the pitch mechanism, and the wrist link 12 is connected to the boom 14 through t...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D Engineer
- R&D Manager
- IP Professional
- Industry Leading Data Capabilities
- Powerful AI technology
- Patent DNA Extraction
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2024 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com