Active teaching method, device and system
A teaching system and teaching device technology, applied in the field of human motion parameter recognition, can solve the problems of inability to learn driving skills independently and high cost of learning to drive, and achieve the effect of saving site costs and high practicability
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
specific Embodiment 1
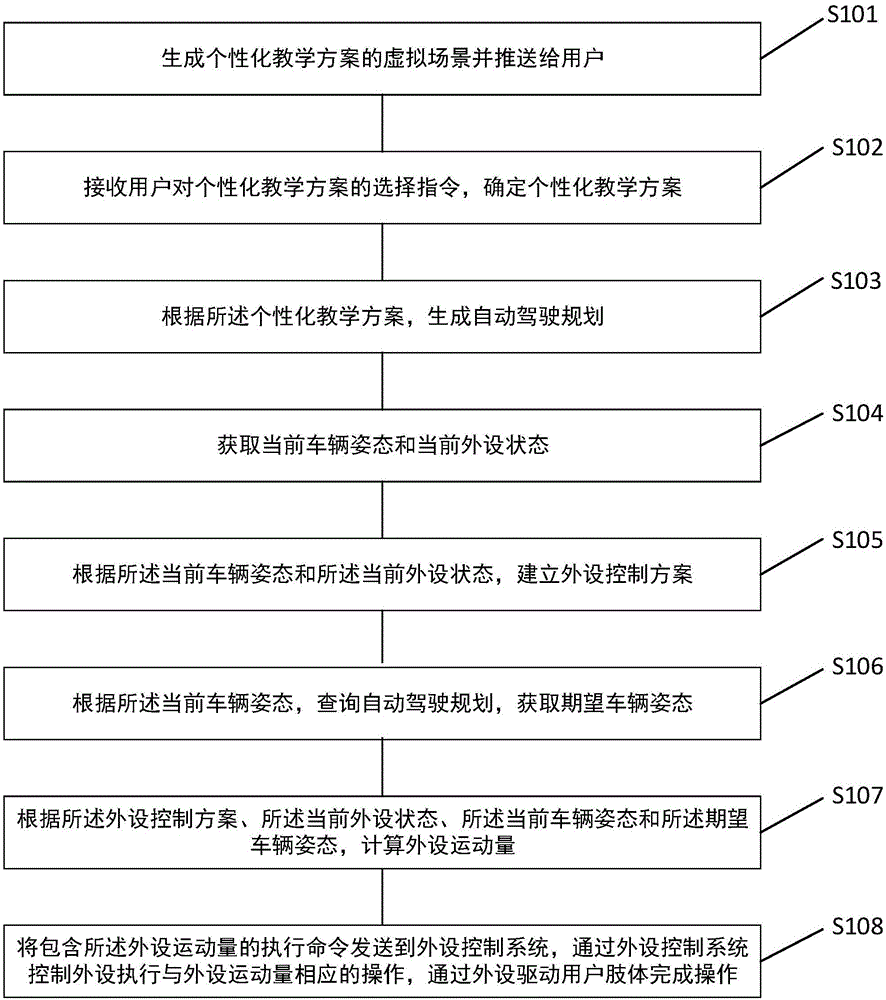
[0046] like figure 1 As shown, the embodiment of the present invention provides a kind of active teaching method, comprises:
[0047] Step S101, generating a virtual scene of a personalized teaching plan and pushing it to the user;
[0048] Step S102, receiving the user's selection instruction on the personalized teaching plan, and determining the personalized teaching plan;
[0049] Step S103, generating an automatic driving plan according to the personalized teaching plan;
[0050] Step S104, obtaining the current vehicle posture and current peripheral status;
[0051] Step S105, establishing a peripheral device control scheme according to the current vehicle attitude and the current peripheral device state;
[0052] Step S106, according to the current vehicle attitude, query the automatic driving plan, and obtain the expected vehicle attitude;
[0053] Step S107, according to the peripheral control scheme, the current peripheral state, the current vehicle attitude and t...
specific Embodiment 2
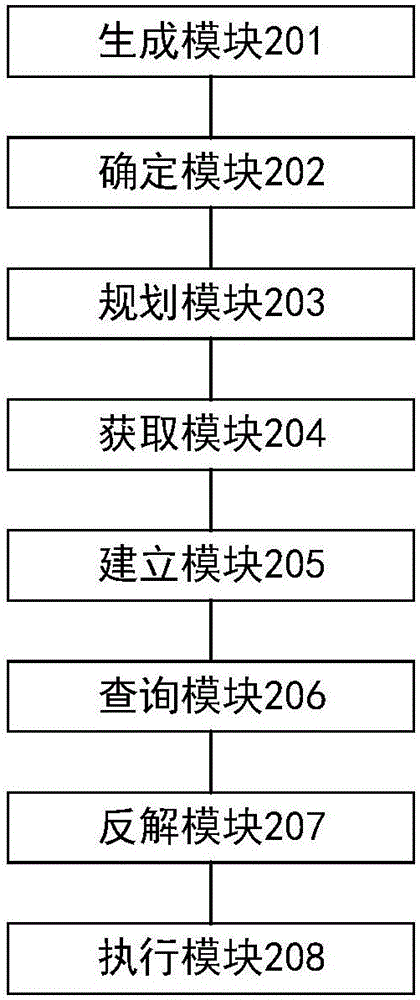
[0065] like figure 2 As shown, the embodiment of the present invention provides an active teaching device, including:
[0066] Generating module 201, is used for generating the virtual scene of individualized teaching plan and pushes to the user;
[0067] A determination module 202, configured to receive a user's selection instruction for a personalized teaching plan, and determine a personalized teaching plan;
[0068] A planning module 203, configured to generate an automatic driving plan according to the personalized teaching plan;
[0069] An acquisition module 204, configured to acquire the current vehicle posture and the current peripheral state;
[0070] An establishment module 205, configured to establish a peripheral control scheme according to the current vehicle posture and the current peripheral state;
[0071] The query module 206 is used to query the automatic driving plan according to the current vehicle posture and obtain the desired vehicle posture;
[00...
specific Embodiment 3
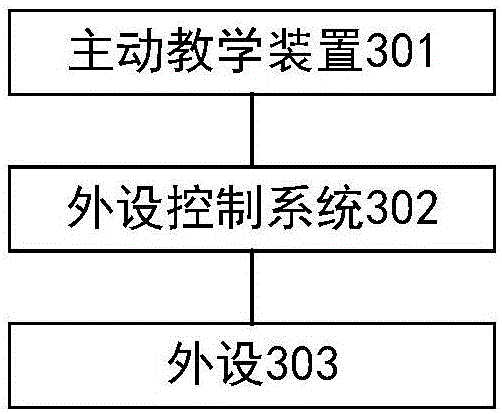
[0082] like image 3 As shown, the embodiment of the present invention provides an active teaching system, including:
[0083] The active teaching device 301 described in any one of the second specific embodiment;
[0084] The peripheral device control system 302 is configured to receive the execution command sent by the active teaching device including the exercise amount of the peripheral device, and control the peripheral device to perform operations corresponding to the exercise amount of the peripheral device according to the execution command;
[0085] The peripheral device 303 is used to perform operations corresponding to the exercise amount of the peripheral device, drive the user's limbs, and teach the user to learn driving skills.
[0086] The embodiment of the present invention pre-sets the teaching plan and pre-sets the test rules. Based on big data and deep learning and guided by the test rules, a personalized teaching plan is formulated. During the driving proc...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com