Inner position loop impedance control algorithm for mechanical arm with joint flexibility/arm lever flexibility
A technology of impedance control and impedance controller, which is applied in the field of intelligent algorithm optimization, can solve problems such as reports and no results of space manipulators
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment Construction
[0032] Taking the space two-link flexible manipulator as the simulation research object, the impedance control algorithm simulation platform is built based on the Simulink platform, and the response of the manipulator to different control algorithms is compared and analyzed.
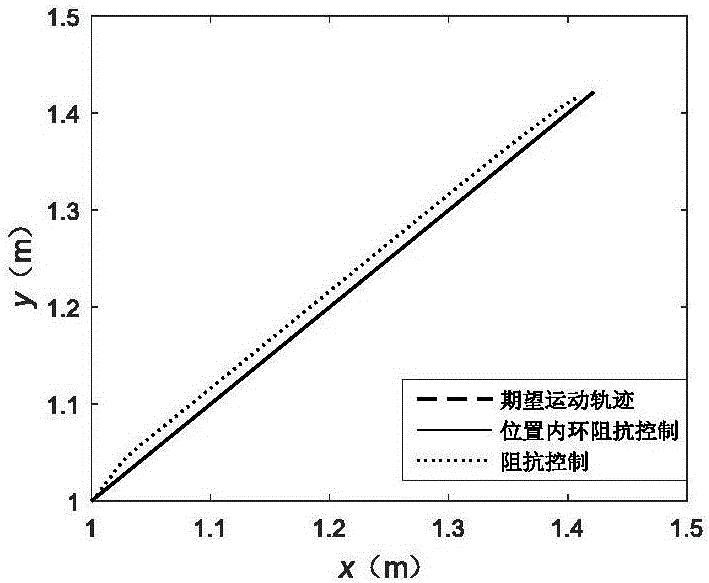
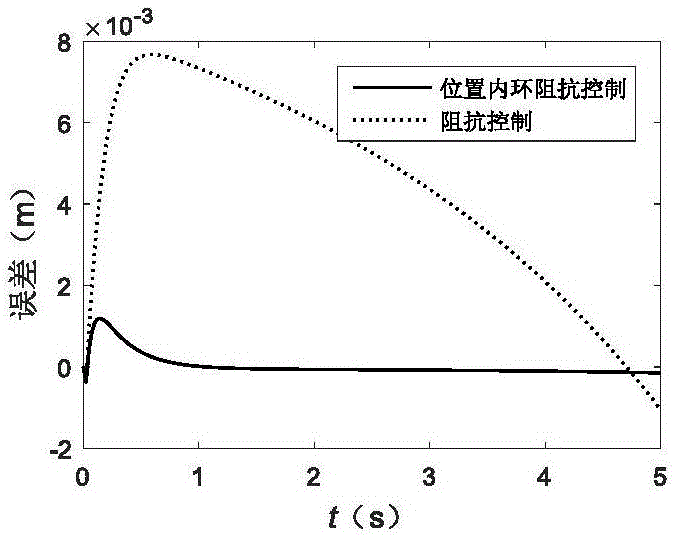
[0033] Based on the System Function function, the position inner loop impedance control algorithm is built in Matlab / Simulink, and the fourth-order Runge-Kutta method with fixed step length is used. The simulation step size is set to 0.01s and the simulation time is 5s. The initial joint position of the manipulator is θ 1 = π / 2, θ 2 =-π / 2, the initial angular velocity of the joint is 0. During the simulation process, the expected movement trajectory of the manipulator is as follows: The desired contact force is 5N.
[0034] take k p is 5, k d is 12, and the control parameters are:
[0035] Finally, the simulation diagram can be obtained, such as figure 1 As shown, it represents the actual traje...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - Generate Ideas
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com