Snakelike robot motion control method based on genetic simulated annealing algorithm
A simulated annealing algorithm and robot motion technology, applied in adaptive control, general control system, control/adjustment system, etc., can solve problems such as low precision, complicated process, and poor reliability
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment Construction
[0074] Reference figure 1 , The present invention provides a snake-shaped robot motion control method based on genetic simulated annealing algorithm, including the steps:
[0075] Obtain the target position and target posture of the snake-shaped robot's head joint;
[0076] The genetic simulated annealing algorithm is used to inversely solve the snake-like robot and obtain the rotation angle of each joint of the snake-like robot;
[0077] The driver of the snake robot obtains the rotation angle of each joint obtained by the solution and controls each joint to rotate. After the rotation angles of the joints of the snake-like robot are obtained, the joints can be controlled to rotate according to the control level of the prior art.
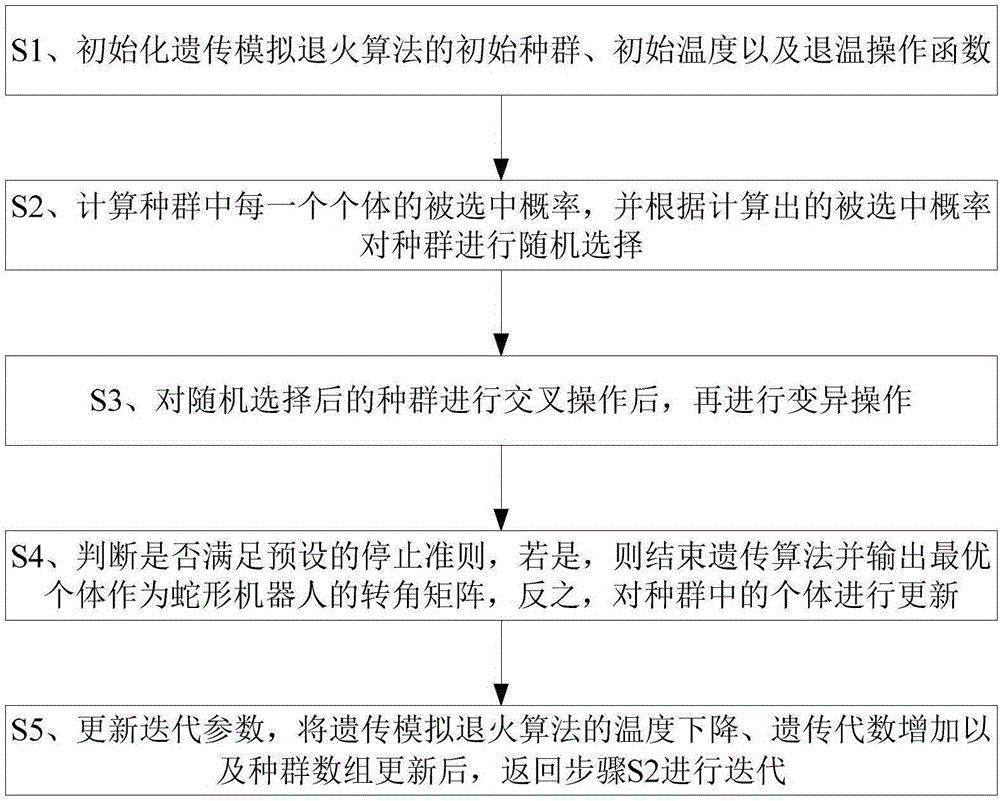
[0078] As a further preferred embodiment, refer to figure 2 The step of using the genetic simulated annealing algorithm to inversely solve the snake-shaped robot to obtain the rotation angle of each joint of the snake-shaped robot includes:
[0079] S1, i...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - Generate Ideas
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com