Vision following method based on monocular gesture recognition
A gesture recognition and gesture technology, which is applied in the control of finding targets, two-dimensional position/channel control, and input/output process of data processing, etc. problem, to achieve the effect of high tracking accuracy, easy and precise tracking, and easy to master
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment Construction
[0063] A visual following method based on monocular gesture recognition proposed by the present invention will be described in detail below in conjunction with the accompanying drawings, taking a human body as an example of a tracking target.
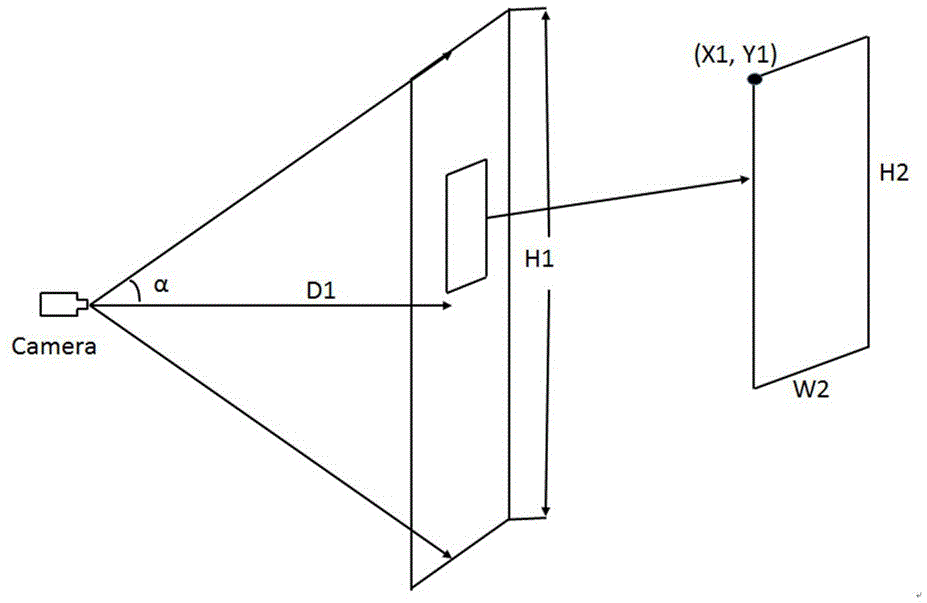
[0064] 1) if figure 1 As shown, the robot takes the first scene picture including human gestures through the camera module, and the picture resolution is W1*H1; it is agreed that the coordinates of the first point in the upper left corner of the captured picture are (1,1), and the last The coordinates of a point are (W1, H1); gestures can be marked by the palm or fingers, or other organs.
[0065] 2) if figure 2 As shown, the robot recognizes the gestures of the human body, and through the gesture recognition software, recognizes the gestures of the human body (such as the front palm), and obtains the position and size parameters of the gesture in the picture frame:
[0066] X1: The x-axis starting point of the gesture in the first sce...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com