Disturbance observation control method for flexible mechanical arm with external disturbances
A technology of flexible manipulator and disturbance observation, which is applied in manipulators, program-controlled manipulators, manufacturing tools, etc., can solve the problems of poor control accuracy and achieve the effect of improving control accuracy
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image



Examples
Embodiment Construction
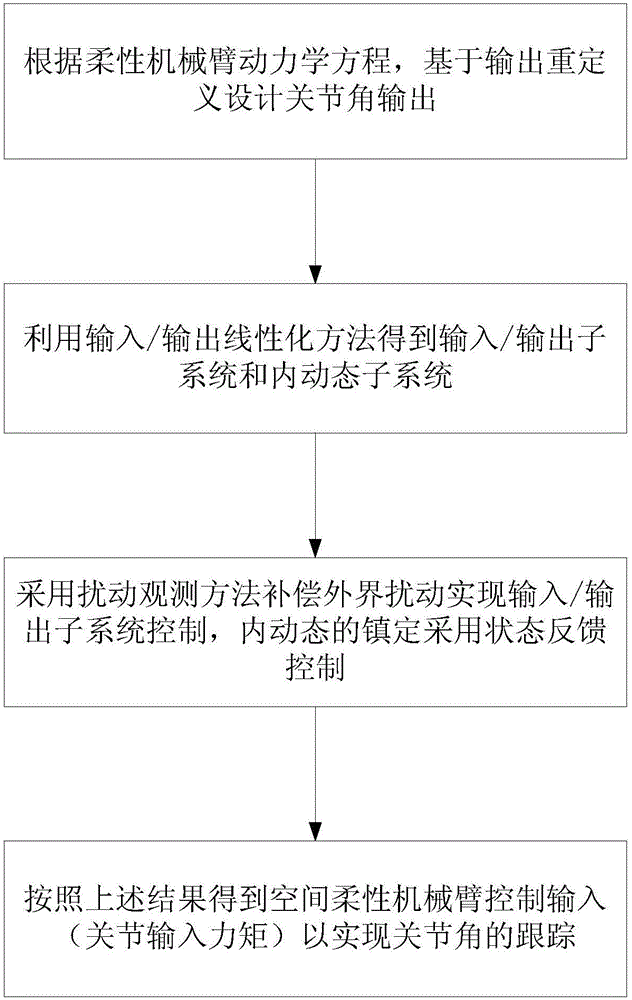
[0044] refer to figure 1 . The specific steps of the disturbance observation control method of the flexible manipulator with external disturbance in the present invention are as follows:
[0045] (a) Dynamic model of n-DOF flexible manipulator:
[0046]
[0047] Among them, M is a positive definite symmetric inertia matrix, is a term related to Coriolis force and centripetal force, D 1 、D 2 is the damping matrix, K 2 is the stiffness matrix, u is the joint input moment, [θ T ,δ T ] T =[θ 1 …theta n …δ 1,1 …δ 1,m …δ n,1 …δ n,m ] T is a generalized vector composed of the joint angles of the manipulator and the flexibility mode, θ i is the i-th joint angle variable, δ i,j is the j-th modal variable of the i-th link, f d is the external disturbance term caused by joint friction and vibration damping of the flexible link;
[0048] Taking the two-link flexible space manipulator as an example, the link length l 1 = l 2 =0.5m, connecting rod mass m 1 = m 2 =0...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com