Unmanned aerial vehicle operator state evaluation method based on multi-sensor measurement and neural network learning
A neural network learning and multi-sensor technology, applied in the field of UAV operator status assessment based on multi-sensor measurement and neural network learning, can solve misjudgment and misoperation, ground station operator workload and increased operational difficulty And other issues
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment Construction
[0052] The present invention will be further described below in conjunction with the accompanying drawings and specific embodiments.
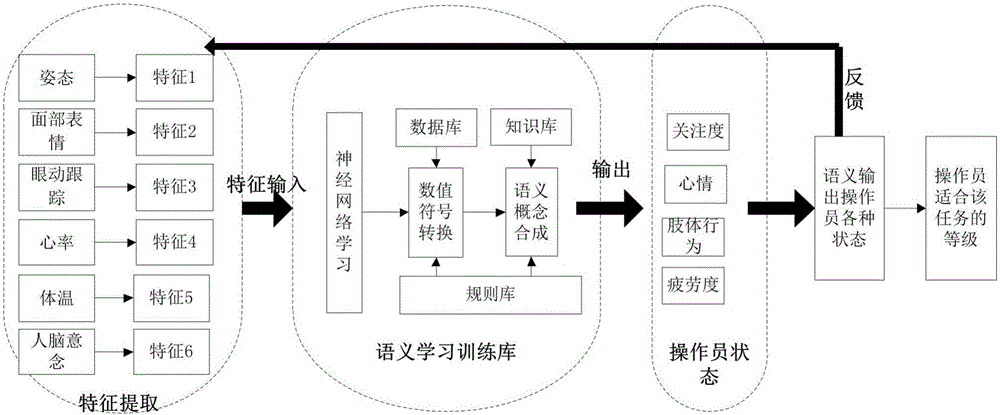
[0053] The present invention aims to provide a UAV operator state assessment method based on multi-sensor measurement and neural network learning, and establishes a mapping relationship with the above-mentioned sensor features and semantics, thereby estimating the operator's decision-making level. This method is convenient for grasping the real-time status of the operator more intuitively, estimating whether the operator is currently suitable for the task, and making corresponding adjustments to the task. Due to the learning method of neural network, the feature space of different operators can be established, so it is suitable for various levels of drone operators with different proficiency. The specific implementation of the method will be described below in conjunction with the accompanying drawings.
[0054] Such as figure 1 Shown is a f...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com