


Quick Research
Generate reliable direction feasibility study reports for your R&D in just a few steps.

Technical Q&A
Discover and master advanced knowledge NOW. Basics, ideas, possibilities, all at once.

Find Solutions
As an expert in R&D theories, this can generate solutions to your technical problems instantly.

Evaluate Feasibility
Analyze your overall solution with one click, know your potential R&D risks in advance.

Monitor Landscape
Get weekly tech updates, stay abreast of the latest tech innovations and key insights.
Control device and method for planar three-degree-of-freedom parallel robot driven by rodless cylinder
A rodless cylinder and control device technology, which is applied to program control manipulators, manipulators, manufacturing tools, etc., can solve the problems of complex circuit design, oil leakage environment, oil viscosity changes, etc., to reduce control difficulty and respond quickly. , the effect of reducing the installation position
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment 1
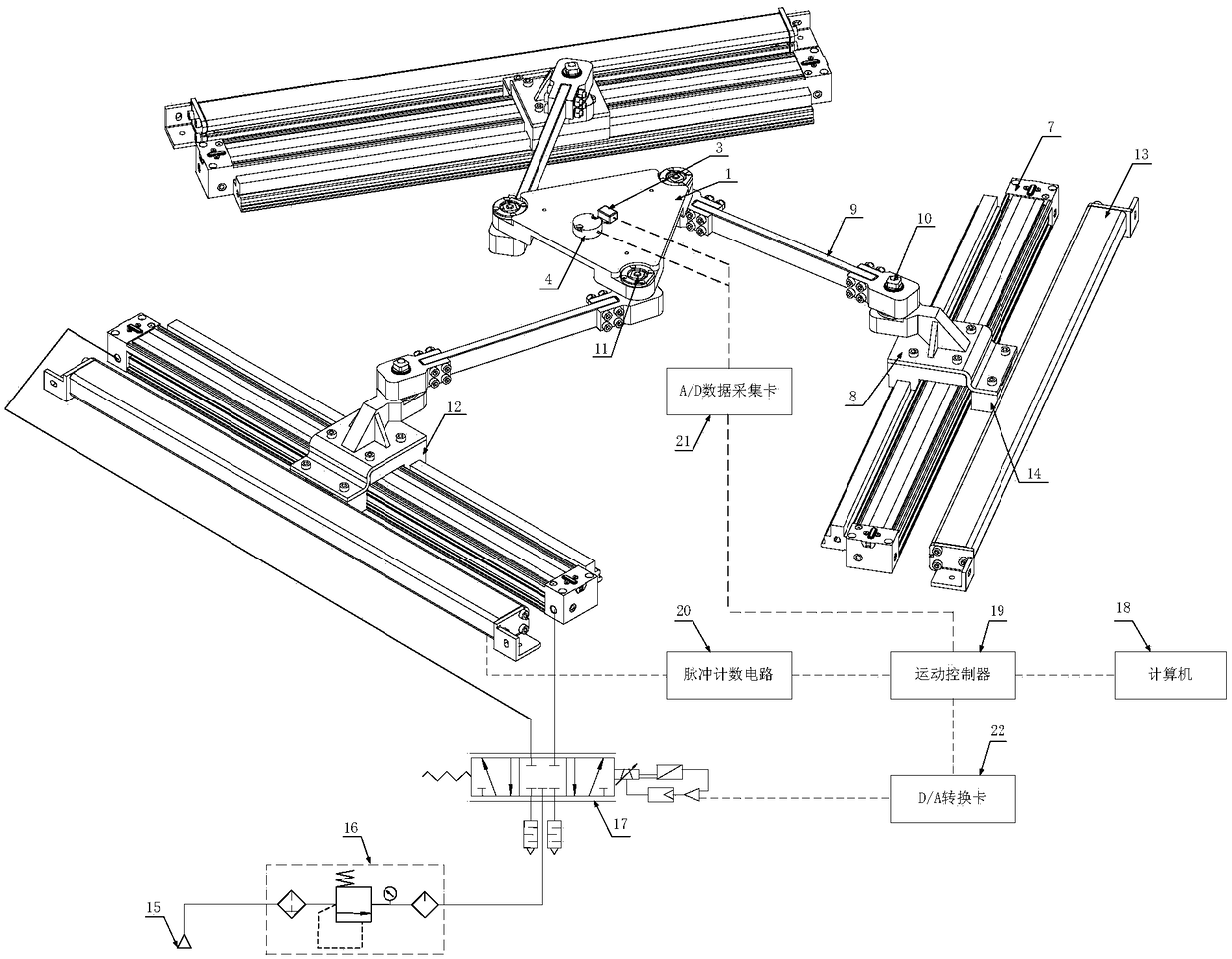
[0035] like figure 1 and figure 2 As shown, this embodiment provides a planar three-degree-of-freedom parallel robot control device, which includes a planar three-degree-of-freedom parallel robot body and a control assembly.
[0036] The body of the planar three-degree-of-freedom parallel robot is a 3PRR (3 moving-rotating-rotating branches) type motion platform, including a moving platform 1, a static platform 2 and three parallel drive control branches, figure 1 The structure of static platform 2 is hidden in , the purpose is to describe the control components of the device more clearly, figure 2 Lieutenant General Jing Platform 2 expressed in detail, figure 1 The dotted line connection in the figure indicates the connection between the electrical signal and the control component, and the solid line connection indicates the connection of the pneumatic control circuit;
[0037] The moving platform 1 is a triangular plate, and the result of the output device operation is ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D Engineer
- R&D Manager
- IP Professional
- Industry Leading Data Capabilities
- Powerful AI technology
- Patent DNA Extraction
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2024 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com