Mobile robot path planning method and system based on improved ant colony algorithm
A mobile robot and path planning technology, applied in control/regulation systems, instruments, non-electric variable control, etc., can solve problems such as slow running speed and slow convergence speed
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
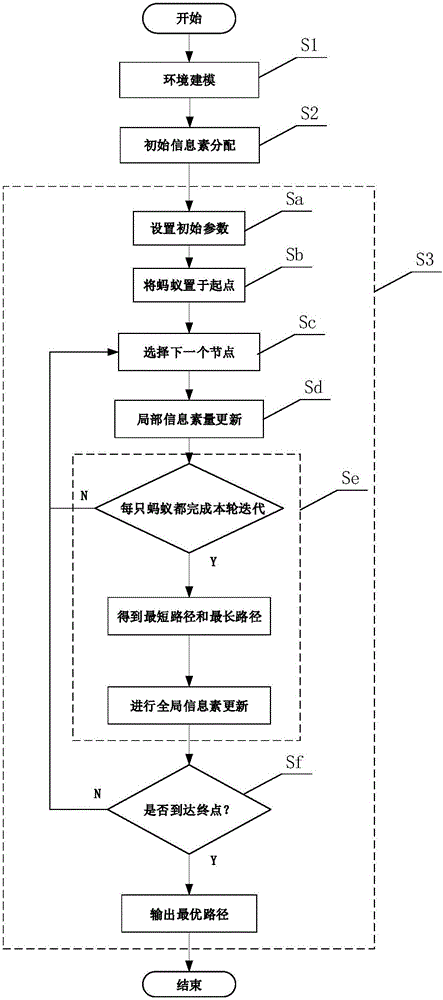
[0078] like figure 1 As shown, the present embodiment 1 provides a mobile robot path planning method, including:
[0079] Step S1, environment modeling;
[0080] Step S2, initial pheromone distribution; and
[0081] Step S3, path optimization, and outputting the optimal path.
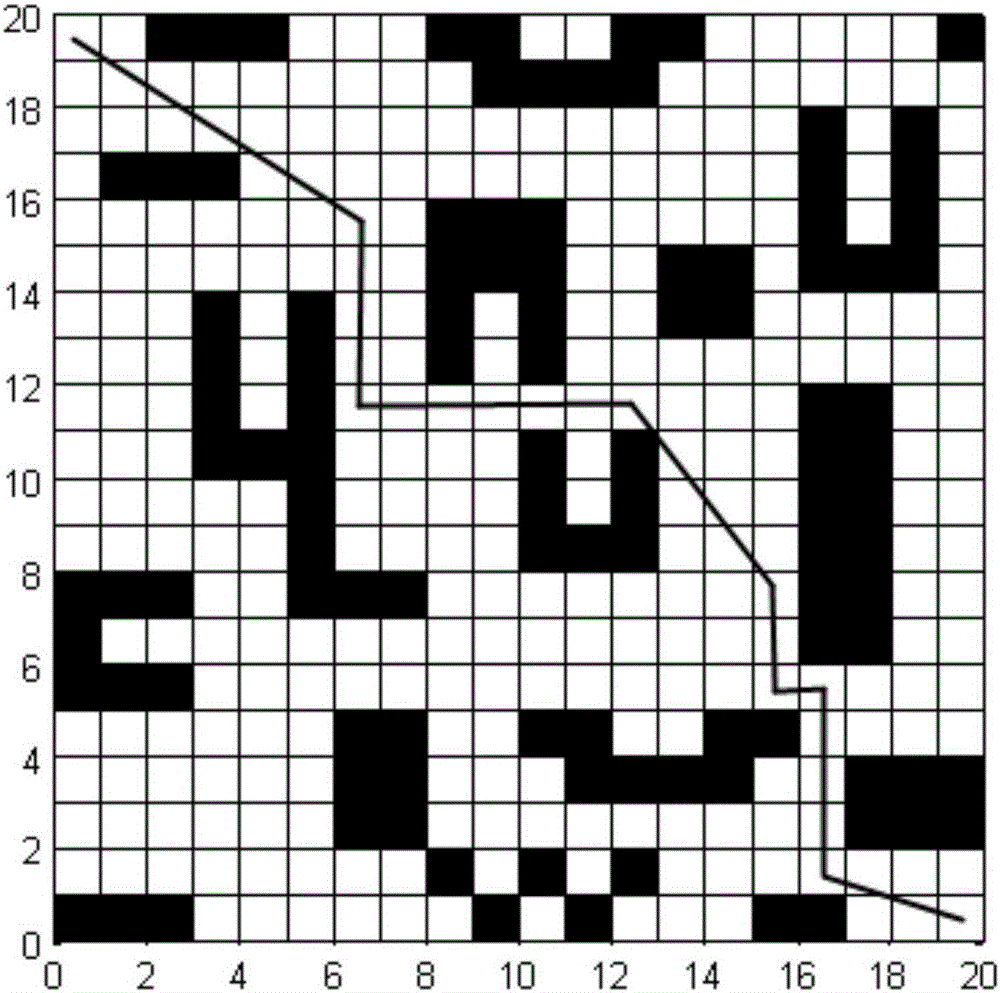
[0082] As a preferred implementation of environment modeling, the environment modeling in the step S1 is to adopt grid environment modeling according to the environment information of the mobile robot. Specifically, the method of using grid environment modeling according to the environment information of the mobile robot includes: using the mobile robot's own sensor group (such as but not limited to cameras, sonar rings, infrared sensors) to collect working environment information, and carry out Map modeling; among them, the mobile robot and each city are used as particle points, the mobile robot and obstacles are modeled according to the two-dimensional coordinate system, and the coordinate processi...
Embodiment 2
[0109] On the basis of embodiment 1, this embodiment 2 also provides a mobile robot path planning system, including:
[0110] The environment modeling unit adopts grid environment modeling according to the environment information of the mobile robot;
[0111] The path planning unit distributes the initial pheromone and outputs the optimal path through path optimization.
[0112] Wherein, the environment modeling unit includes: a mobile robot with environmental information collection sensors;
[0113] The mobile robot collects working environment information and performs map modeling; wherein, the mobile robot and each city are used as particle points, and the mobile robot and obstacles are modeled according to a two-dimensional coordinate system.
[0114] The path planning unit outputs the optimal path through initial pheromone allocation and path optimization; wherein
[0115] Initial pheromone allocation, that is, the initial pheromone is allocated according to the principle...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - Generate Ideas
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com