Local obstacle avoidance considering UUV moving object sliding mode tracking control method
A technology for tracking control and moving targets, which is applied in the target tracking field of underwater unmanned vehicles
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment Construction
[0050] The present invention will be further described below in conjunction with accompanying drawing:
[0051] When UUV performs tasks such as recovery and docking, it needs to follow and track specific targets. For complex underwater environments, random obstacles (ships, plankton, underwater garbage, etc.) will inevitably appear on the track of target movement routes. The invention provides a simple and effective UUV dynamic environment tracking control method.
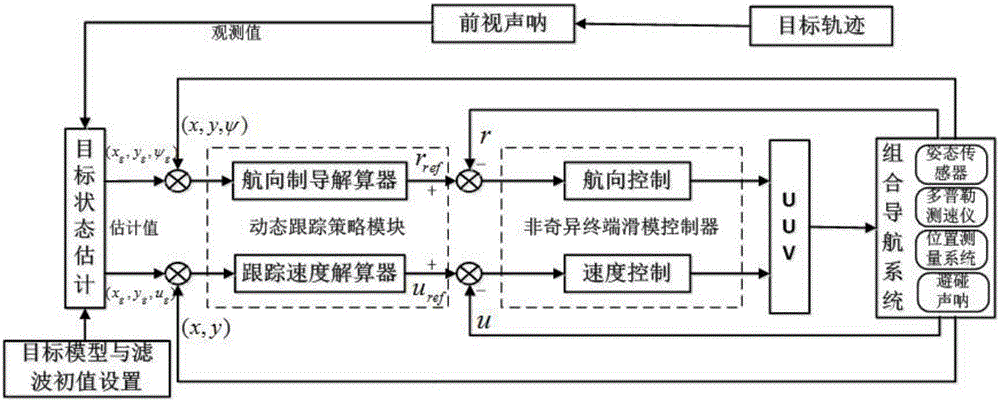
[0052] figure 1 It is the overall working block diagram of the present invention, which is mainly divided into four parts: UUV model and detection system, target state estimation, dynamic programming module and non-singular terminal sliding mode controller. The positions of targets and obstacles are obtained by the UUV sonar detection system, and the UUV Status information is determined by its integrated navigation system, combined with Figure 9 Describe the specific steps of the present invention.
[0053] Ste...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com