Hydraulic swing cylinder driving joint based robot hydraulic mechanical arm
A hydraulic swing and hydraulic machinery technology, applied in the direction of manipulators, program-controlled manipulators, claw arms, etc., can solve the problems of poor strain capacity, low power density of manipulator arms, and small carrying capacity, so as to reduce the difficulty of manufacturing and facilitate modularization The effect of improving production and carrying capacity
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
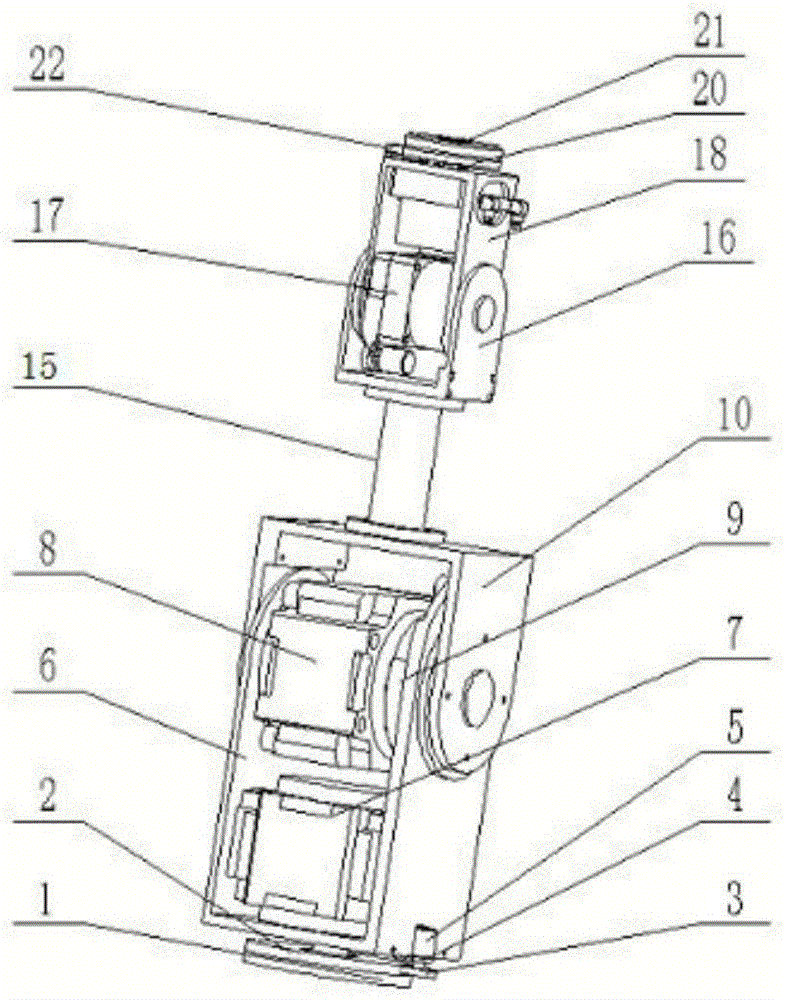
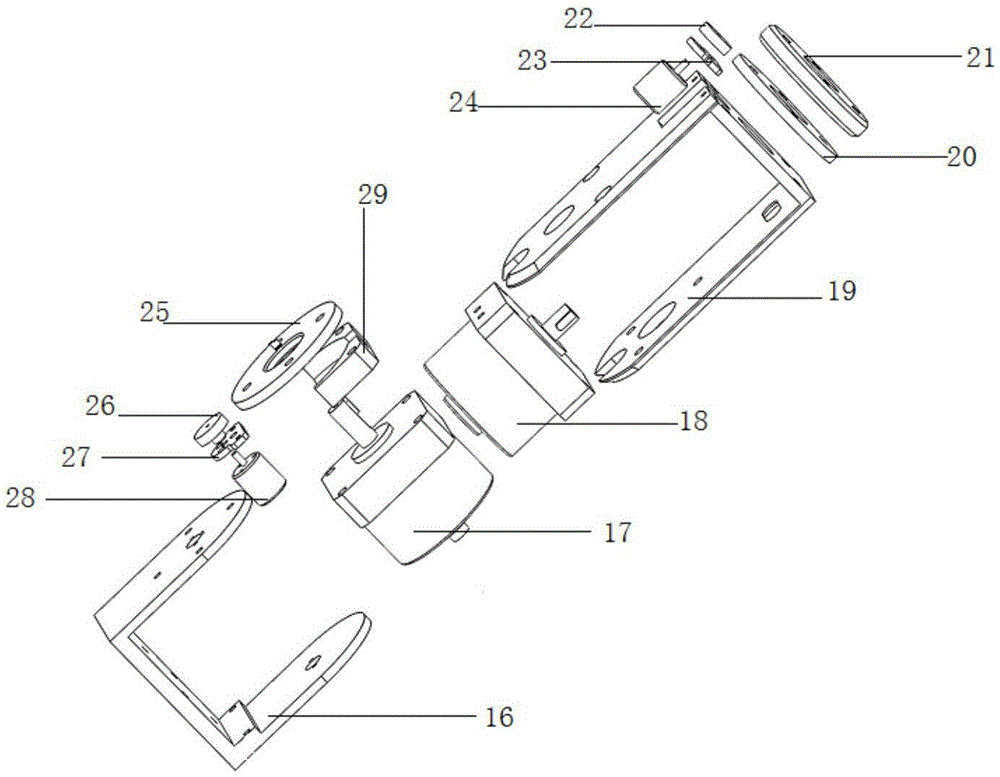
[0034] Such as figure 1 As shown, a robot hydraulic mechanical arm based on a hydraulic swing cylinder driven joint includes a small joint arm and a large joint arm, and the small joint arm and the large joint arm are connected by a joint arm connecting rod 15, and the small joint arm and the large joint arm The drive joints include two hydraulic swing cylinders whose output shaft ends are perpendicular to each other. The hydraulic swing cylinders are arranged in the support frame. The output shaft ends of the hydraulic swing cylinders inside the support frame are connected with gears. The potential of the gears and the potentiometer terminal is gear meshes. In the robot hydraulic mechanical arm based on the hydraulic swing cylinder driving joints of the present invention, the output shaft end of the hydraulic swing cylinder inside the U-shaped support frame of each joint arm is connected with a gear, and is connected with each end of the potentiometer connected by the connect...
Embodiment 2
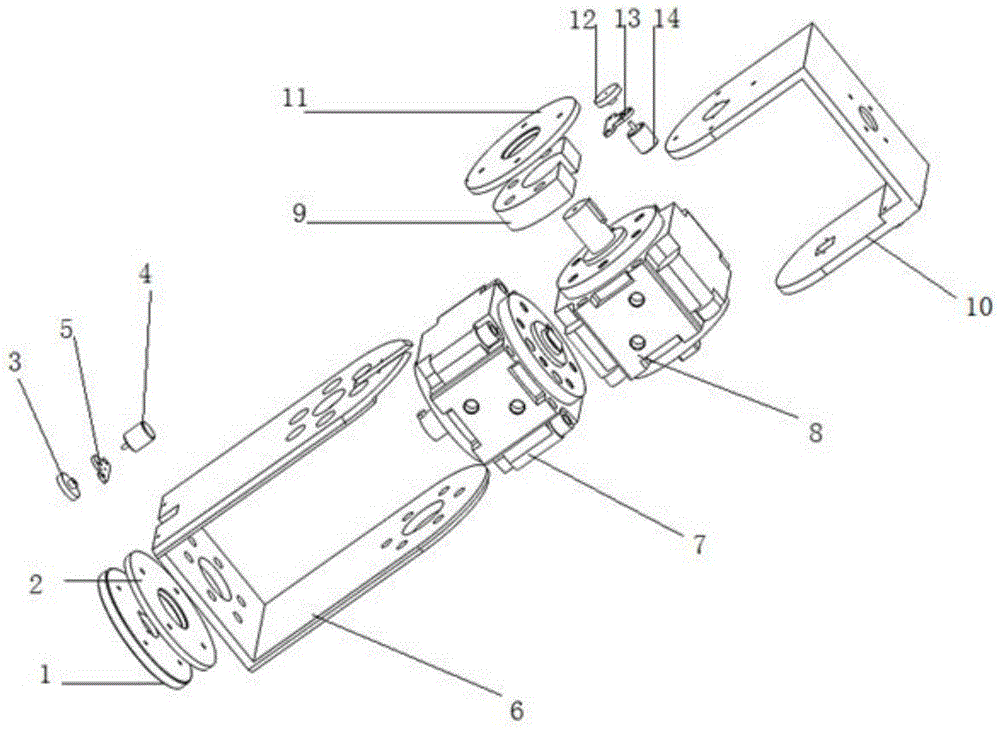
[0056] A robot hydraulic mechanical arm based on hydraulic swing cylinder-driven joints. The difference from Embodiment 1 is that the base connection plate 1 is connected to the large gear A2 through screws to ensure a stable connection with the large gear A2 and to be fixed on the hydraulic swing cylinder together. A7 output shaft.
Embodiment 3
[0058] A robot hydraulic mechanical arm based on a hydraulic swing cylinder-driven joint. The difference from Embodiment 2 is that the output shaft end of the hydraulic swing cylinder A7 passes through the bottom surface of the U-shaped lower support frame 6 of the large joint arm, and its cylinder body is composed of Screws are fixed on the inside of the U-shaped lower support frame 6 of the large joint arm.
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com