A Ship Dynamic Positioning Control System Based on Equivalent Disturbance Compensation
A technology of disturbance compensation and dynamic positioning, which is applied in the direction of control/regulation system, two-dimensional position/channel control, non-electric variable control, etc., and can solve the problem of not fully considering the nonlinear uncertainty of the ship motion model
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
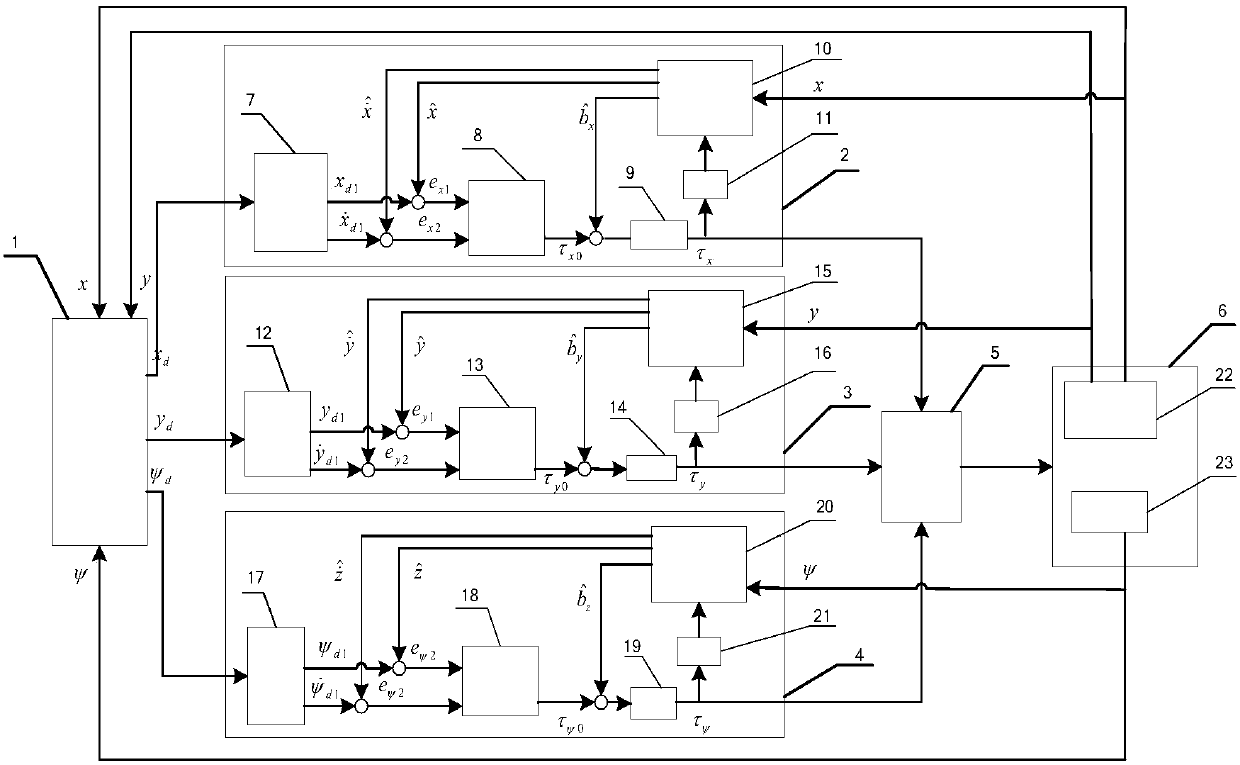
[0080] The present invention is described in detail below in conjunction with accompanying drawing:
[0081] figure 1 Middle 1—display and control computer; 2—longitudinal controller; 3—lateral controller; 4—heading controller; 5—thrust system; 6—dynamic positioning ship; 7—longitudinal path generator; 8—longitudinal error feedback control 9—longitudinal disturbance compensator; 10—longitudinal expansion state observer; 11—longitudinal disturbance compensation factor; 12—transverse path generator; 13—transverse feedback controller; 14—transverse disturbance compensator; 15—transverse expansion state Observer; 16—lateral disturbance compensation factor; 17—heading path generator; 18—heading feedback controller; 19—heading disturbance compensator; 20—heading expansion state observer; 21—heading disturbance compensation factor ; 22—GPS (Global Navigation Satellite System); 23—Gyroscope.
[0082] The invention relates to a ship dynamic positioning control system based on equival...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com