


Quick Research
Generate reliable direction feasibility study reports for your R&D in just a few steps.

Technical Q&A
Discover and master advanced knowledge NOW. Basics, ideas, possibilities, all at once.

Find Solutions
As an expert in R&D theories, this can generate solutions to your technical problems instantly.

Evaluate Feasibility
Analyze your overall solution with one click, know your potential R&D risks in advance.

Monitor Landscape
Get weekly tech updates, stay abreast of the latest tech innovations and key insights.
Method for steering vehicle
A vehicle and sub-path technology, applied in general control systems, vehicle components, program control, etc., can solve problems such as limiting path global optimization and errors
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image



Examples
Embodiment Construction
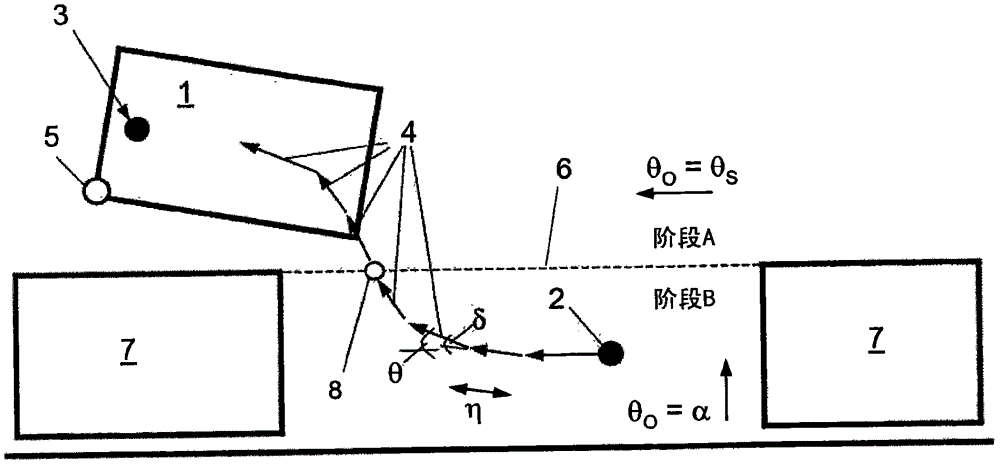
[0043] figure 1 A schematic diagram showing the vehicle kinematics model used. Vehicle 1 (not shown) has length l c and width w c , eg corresponds to the table shown, and moves in the direction of the vector v, where the vehicle initially has a vehicle orientation θ with respect to the coordinate system used. The two wheels on an axis are merged here to form an imaginary wheel 10 in each case in the center of the axis, the front wheels having a steering angle δ. In the described embodiment, the maximum steering angle is 45°. The distance between two wheels is the corresponding wheelbase L of the vehicle.
[0044] Figure 2a A vehicle 1 is shown which is located at a starting position 2 and is to be driven to an end position 3 without touching an obstacle 7 . For this purpose, a series of subpaths 4 is determined, wherein for each subpath a static optimization problem is solved.
[0045] Depending on the position of the corner points 5 of the vehicle relative to the imag...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D Engineer
- R&D Manager
- IP Professional
- Industry Leading Data Capabilities
- Powerful AI technology
- Patent DNA Extraction
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2024 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com