Distributed SLAM (simultaneous localization and mapping) method on basis of global optimal data fusion
A globally optimal, data fusion technology, applied in navigation computing tools and other directions, can solve problems such as comprehensive analysis and evaluation of unfused systems, blindness in fusion system design, and ambiguity obstacles.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0076] Step 1: Build the model and linearize.
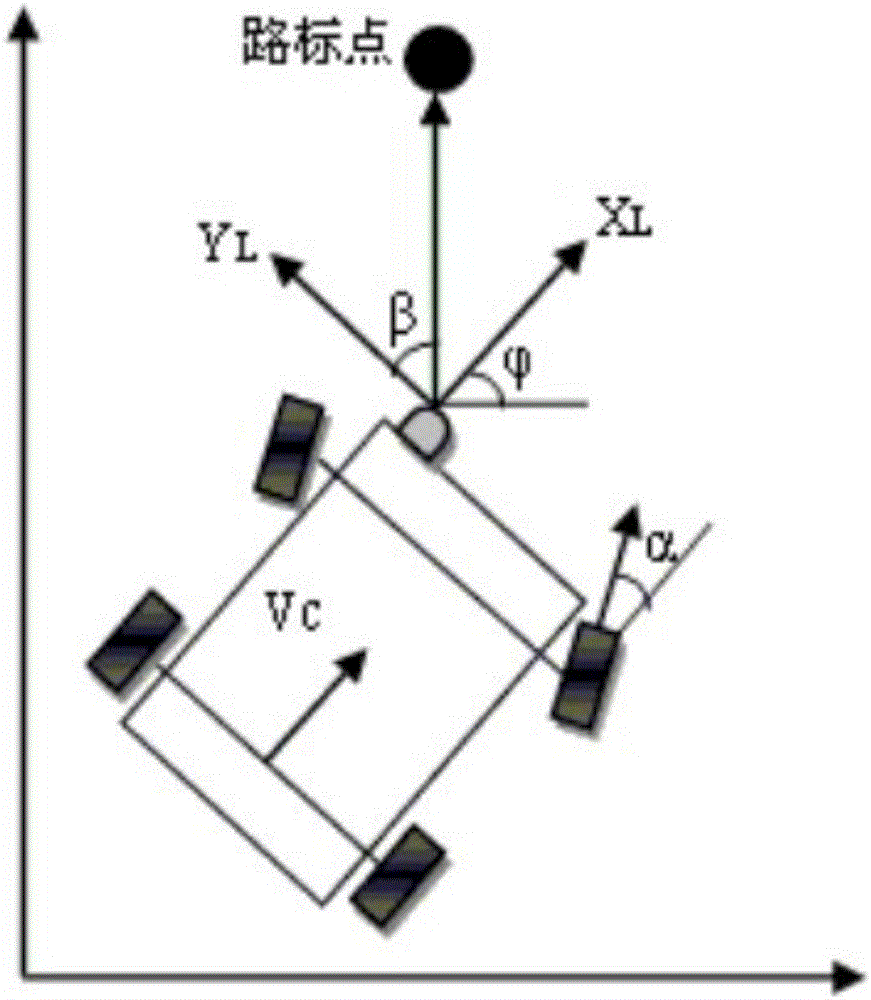
[0077] The entire state vector is divided into five-dimensional states of robot pose estimation and landmark estimation, and the state vector is: x v =[x L ,y L ,φ L ,x i ,y i ] T , X L ,y L ,φ L Is the state of the car, x i ,y i It is the state of the landmark. The Jacobian matrix H of the observation model after extended Kalman linearization is equation (5).
[0078] Step 2: Initialization.
[0079] Establish a coordinate system, take the position of the robot at the initial time as the origin of the coordinates, and use the directions of true east and true north as the positive directions of the x-axis and y-axis; the global map is initialized, and the robot is at the initial position, using the location information of the landmark points measured by sensor Environment map, and store it as a global map together with the pose of the robot at the initial moment (ie the position and angle of the robot).
[0080] Step 3: Map matching and...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com