A structure of a rope-driven mechanical arm rotary joint
A technology of rotating joints and robotic arms, applied in the field of robotics, can solve the problems of many wheel sets, heavy weight, inability to solve joint motion coupling and small driving range, and achieve the effect of precise control and convenient protection
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment Construction
[0030] The specific implementation of the present invention will be further described in detail below in conjunction with the accompanying drawings, but the implementation of the present invention is not limited thereto.
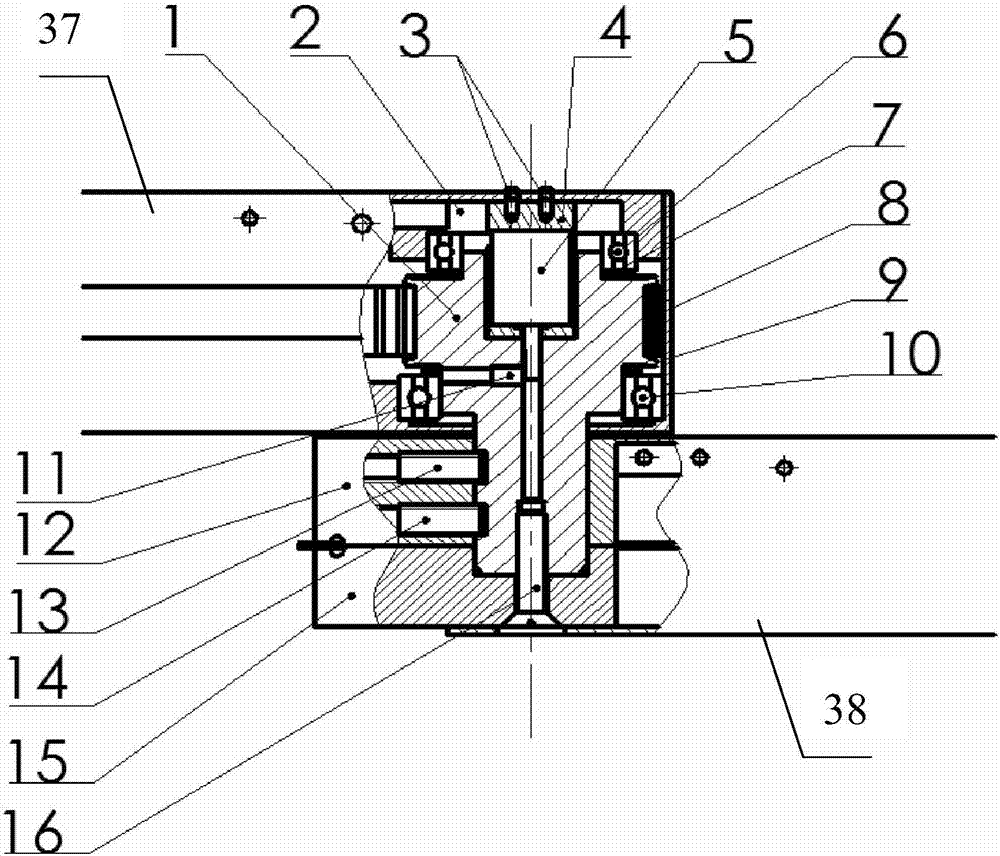
[0031] Such as Figure 1 to Figure 4As shown, a structure of a rope-driven mechanical arm rotary joint includes a synchronous belt wheel shaft 1, a synchronous belt 8, an angle sensor 5, an arm joint bearing end cover 2, a deep groove ball bearing 6, an angular contact ball bearing 10, and a connection hole and the mechanical arm connecting the steel wire rope through hole, the synchronous pulley shaft 1 includes a pulley end 17 and a shaft end 19 from top to bottom, along the axis of the synchronous pulley shaft 1, a sensor accommodation hole 21, a sensor output Shaft connection hole 22, cross countersunk screw internal thread hole 23, the inner ring of the deep groove ball bearing 6 and the angular contact ball bearing 10 are respectively fixed on the uppe...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com