Vehicle location positioning information fusion method based on vehicular ad hoc network
A self-organizing network and positioning information technology, which is applied in the direction of location information-based services, network topology, wireless communication, etc., can solve problems such as failure to achieve
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
[0165] Example 1, bicycle fusion scheme:
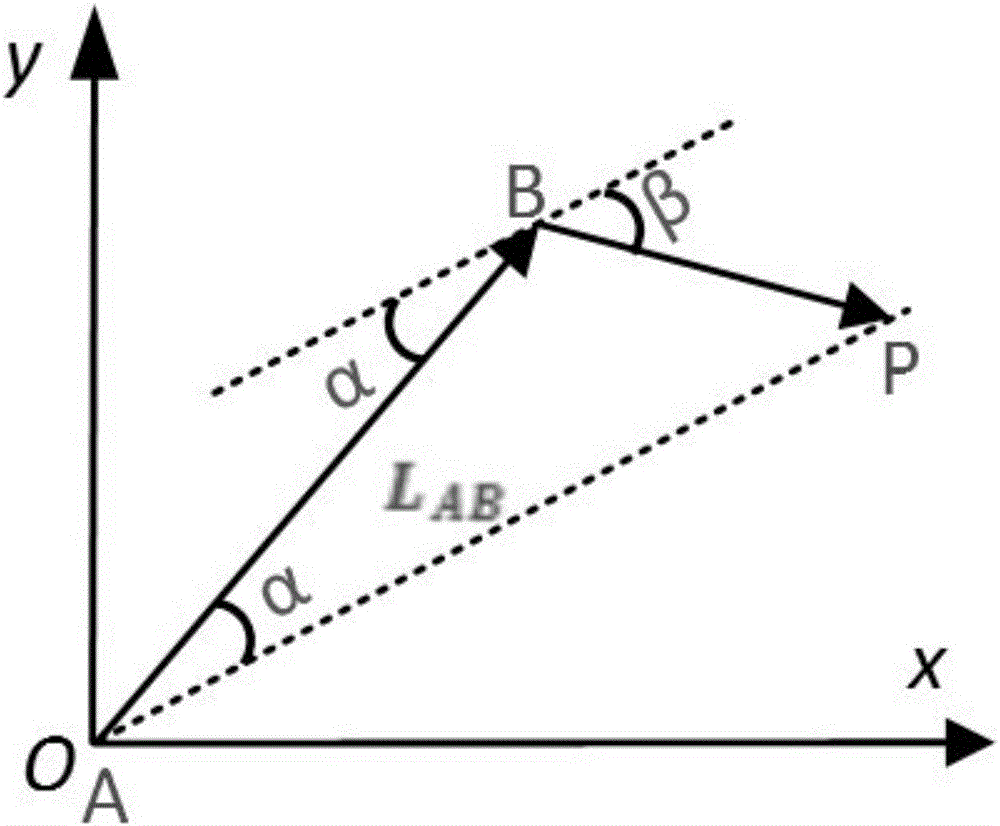
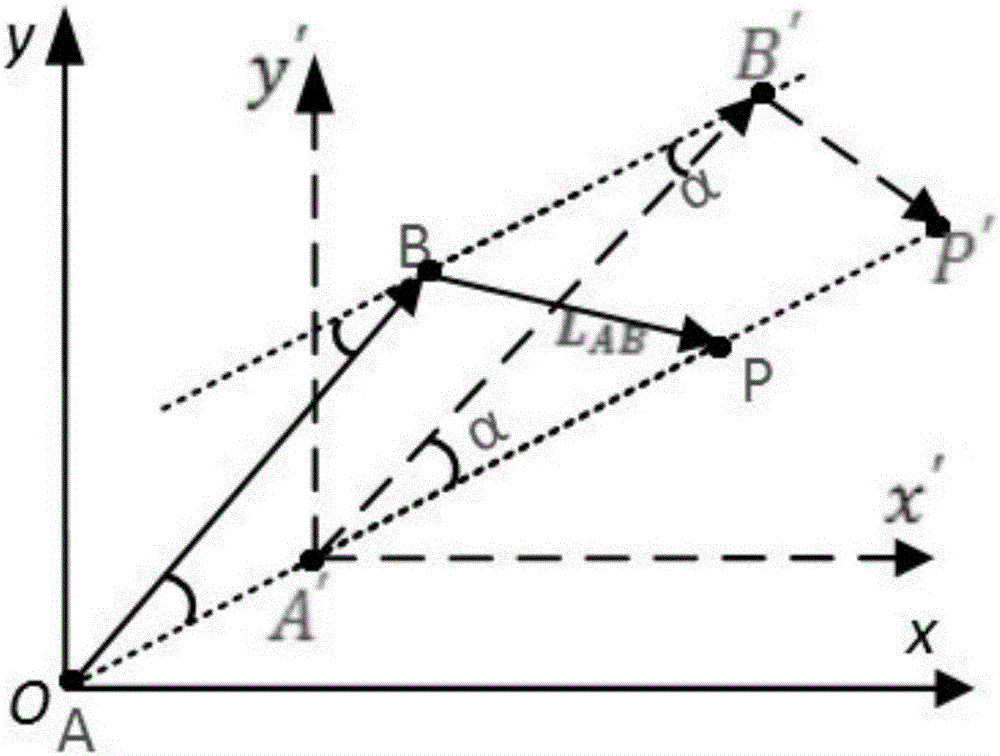
[0166] Bicycle fusion refers to the data fusion realized after the vehicle receives the sensor data shared by a vehicle in the system. In fact, the added data comes from one other vehicle in the system, so it is called single-vehicle fusion. Such as Figure 4 Shown:
[0167] A and B are vehicles in the system. Taking A as the first perspective, car A can obtain the sensor data shared by car B in the system. At the same time, car A can also obtain its own GPS data in real time, the measurement data of car B by image ranging, and the data measured by car B by radar ranging. L AP More accurate results can be obtained through the data fusion scheme proposed by the present invention. Its program flow chart is as follows: Figure 5 as shown,
[0168] Step 1: Acquire the data of car B according to the above method, and perform pre-correction and fusion to obtain L AB = S AB(GPS) +ω AB(GPS) and the modified L B′P′ .
[0169] Step...
Embodiment 2
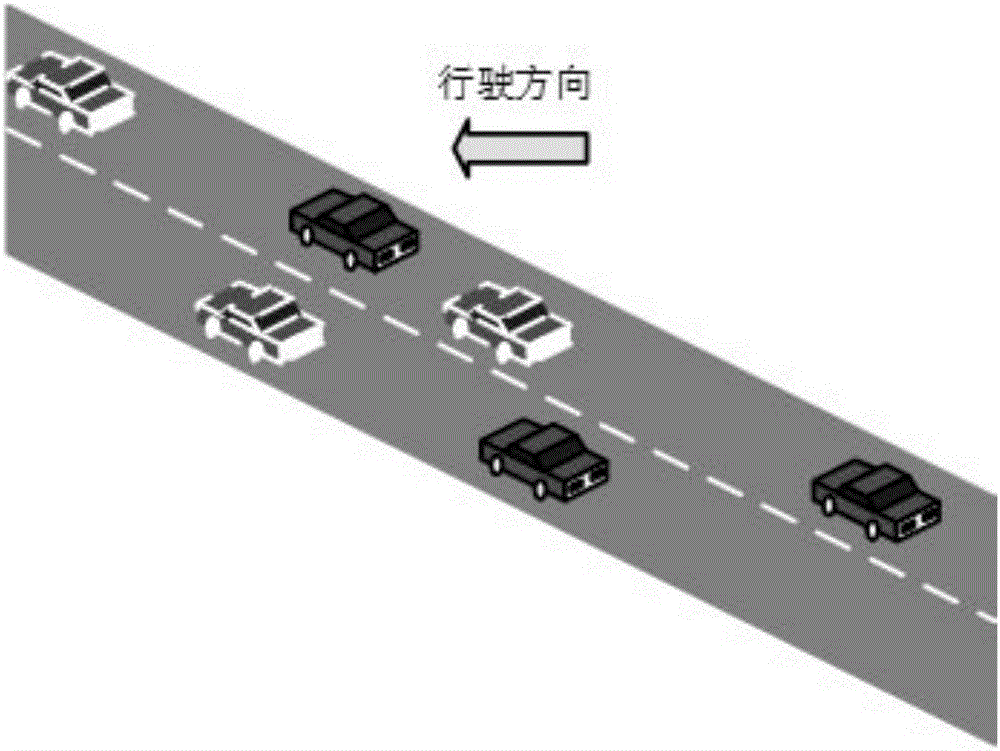
[0179] Embodiment 2, multi-vehicle data fusion scheme
[0180] Such as Figure 7 As shown, multi-vehicle fusion refers to the data fusion realized after the own vehicle receives the sensor data shared by multiple vehicles in the system. In fact, the added data comes from multiple other vehicles in the system, so it is called multi-vehicle fusion. Multi-vehicle fusion is suitable for the application scenarios shown in the figure above. Using the bicycle fusion method in Example 1, L can be obtained ABP , L ACP , L ADP , L AEP . Then apply the fuzzy closeness fusion method mentioned above to eliminate the missing data, and finally get is the final optimal result,
[0181] The flow chart of the multi-vehicle data fusion scheme is as follows: Figure 8 shown.
[0182] The steps of the multi-vehicle fusion method are as follows:
[0183] Step 1: Using the single-vehicle fusion fusion scheme in Example 1 multiple times, multiple optimization results can be obtained. If...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com