Synchronous positioning and map constructing method under random finite set framework
A technology of synchronous positioning and map construction, applied in the field of mobile robots, can solve problems such as inability to deal with nonlinear PHD functions, achieve the effects of improving the ability to deal with nonlinear and non-Gaussian problems, avoiding estimation errors, and strong robustness
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image



Examples
Embodiment approach
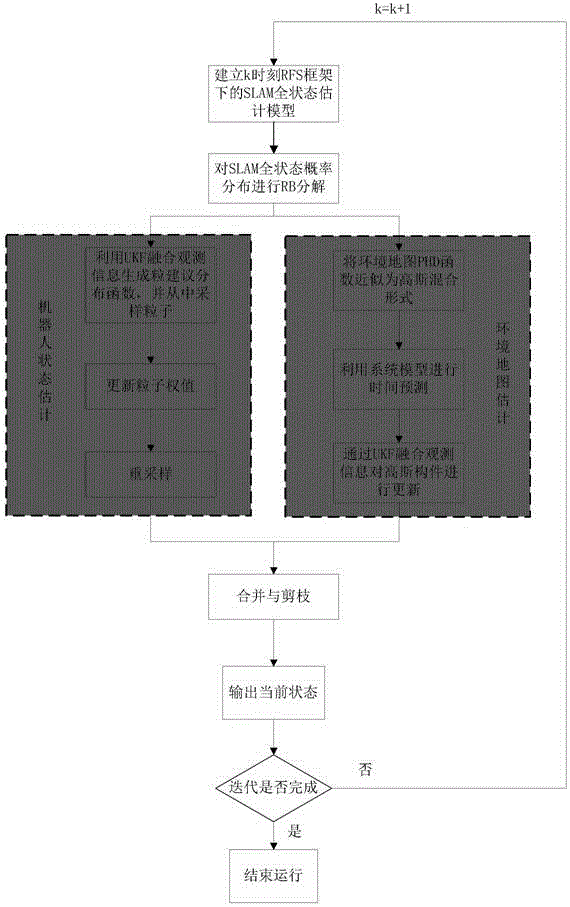
[0034] The invention discloses a mobile robot synchronous positioning and map construction method under the framework of a random finite set. The specific implementation of the method includes finite set modeling, SLAM full state decomposition, robot state estimation, environment map estimation, and SLAM state estimation output, etc. key content. The method for synchronous positioning and map construction under the framework of random finite sets described in the present invention is implemented by a computer program, figure 1 Shown is a computer-implemented system structure diagram. The specific implementation of the technical solution proposed by the present invention will be described in detail below according to the flow process, and the flow process is as follows figure 2 shown. The implementation of the method mainly includes the following key contents:
[0035] For the mobile robot system described by formula (1), is the state variable of the robot at time k, in t...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com