Bistatic MIMO radar array target angle estimation and mutual coupling error calibration method
A radar array, target angle technology, applied in the direction of reflection/re-radiation of radio waves, use of re-radiation, measurement devices, etc., can solve the problem of high computational complexity of the algorithm, achieve good estimation performance, small amount of computation, and high estimation accuracy Effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment Construction
[0030] The present invention will be further described below in conjunction with the accompanying drawings and specific embodiments.
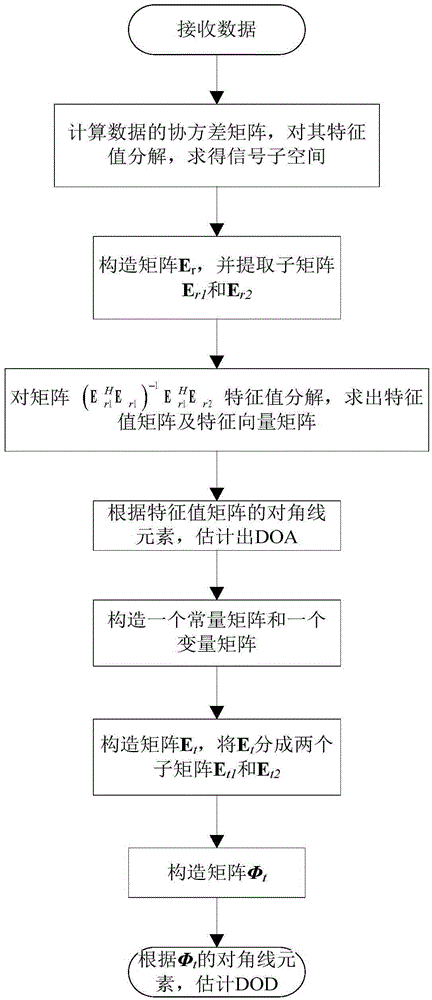
[0031] Such as figure 1 As shown, it is a flow chart for the implementation of the present invention. A method for estimating the target angle of a bistatic MIMO radar array and calibrating mutual coupling errors proposed by the present invention includes the following steps:
[0032] Step 1, the bistatic MIMO radar system at t l The data vector received at any time is:
[0033] x(t l ) = As(t l )+n(t l )(1)
[0034] In formula (1), l=1,2,...,L, L represents the snapshot number; s(t l ) means t l A P-dimensional transmit signal vector at time, n(t l ) means t l An MN-dimensional zero-mean white Gaussian noise at any moment; A represents an MN×P-dimensional array flow pattern matrix, where M represents the number of array elements in the transmitting array, N represents the number of array elements in the receiving array, and P represen...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com