Robot cleaner and cleaning path planning method thereof
A sweeping robot and path planning technology, applied in the field of robotics, can solve problems such as low repetition rate, inability to plan coverage well, and robots will not respond immediately, so as to achieve strong practicability, improve cleaning efficiency and area , high reliability effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0056] The technical solution of the present invention will be described in further detail below in conjunction with the accompanying drawings and embodiments, and the following embodiments do not constitute a limitation of the present invention.
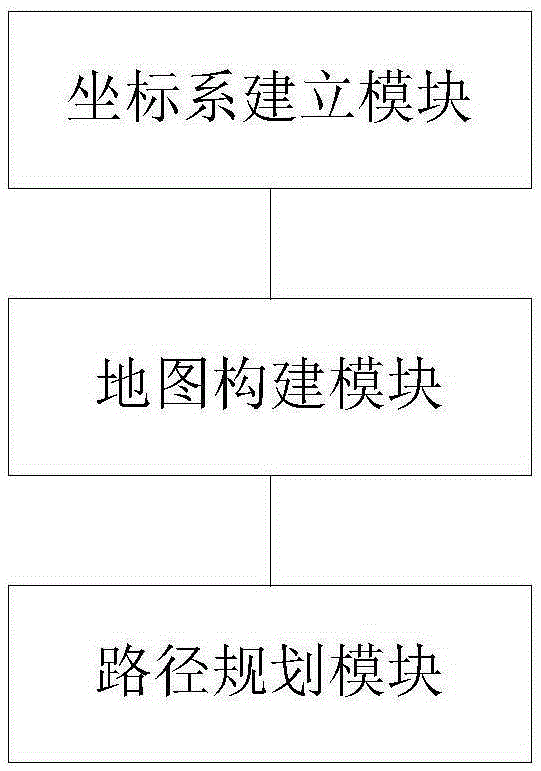
[0057] In addition to the general cleaning function, existing sweeping robots also have several modes such as random cleaning mode, edge cleaning mode, spiral cleaning mode, and cross cleaning mode. Finish cleaning. This embodiment is a sweeping robot. Such as figure 1 As shown, on the basis of the existing sweeping robot, a coordinate system establishment module, a map construction module and a path planning module are provided. The sweeping robot in this embodiment can efficiently and reliably complete the cleaning work, can break away from the random cleaning mode, and follow the planned path to clean the entire area as much as possible and not repeatedly encounter the same obstacle, so as to achieve high coverage, Cleaning pr...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com