Detection and repair method for single gross error of observed quantity in satellite navigation system
A technology of a satellite navigation system and a repair method, which is applied in the field of detection and repair of a single gross error in a satellite navigation system, can solve problems such as poor safety and reliability, and achieve the effect of high reliability and accurate detection position
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment
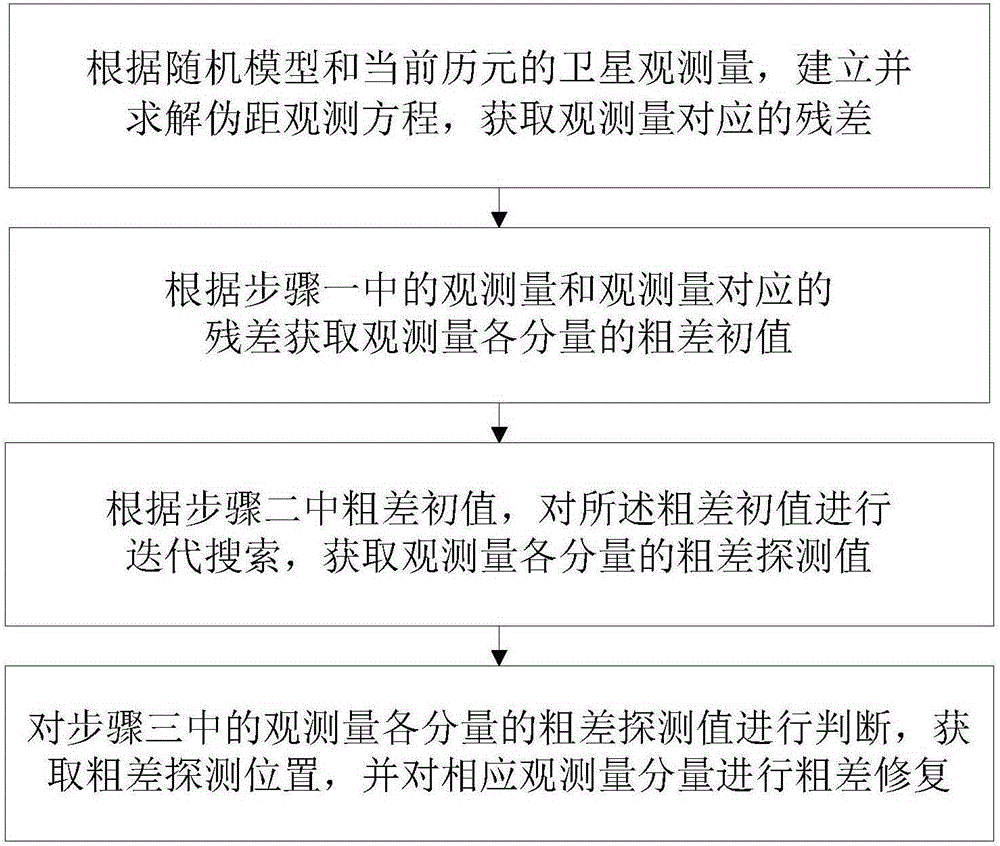
[0038] Embodiment: Step 1: the pseudorange observation equation of the global satellite navigation system GNSS is AX=L, and in the stochastic model, the weight matrix is P, expressed as
[0039]
[0040] In the formula, X is the position parameter vector, A is the coefficient matrix, and the observed quantity is L, expressed as L=[l 1 l 2 …l k …l n ] T . According to the least squares estimation method, the estimation of the location parameter vector X is obtained, and the residual error corresponding to the observation L is expressed as:
[0041] V=(I-A(A T PA) -1 A T P) L=L-AX=e=[v 1 v 2 … v k … v n ] T , where I is the identity matrix.
[0042] Described step two comprises steps:
[0043] S201: Calculate the residual corresponding to the unit vector according to the pseudorange observation equation;
[0044] The unit vector group is b k ,k=1,2,...,n, unit vector group includes n vectors, unit vector b k for b k =[00...1...0] T , indicating that the k...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - Generate Ideas
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com