A three-degree-of-freedom compliant actuator with a hybrid power source
A hybrid, degree-of-freedom technology, used in manufacturing tools, manipulators, program-controlled manipulators, etc., to achieve the effects of good self-recovery ability, easy control, and improved stiffness
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0019] Below in conjunction with accompanying drawing, the present invention will be further described:
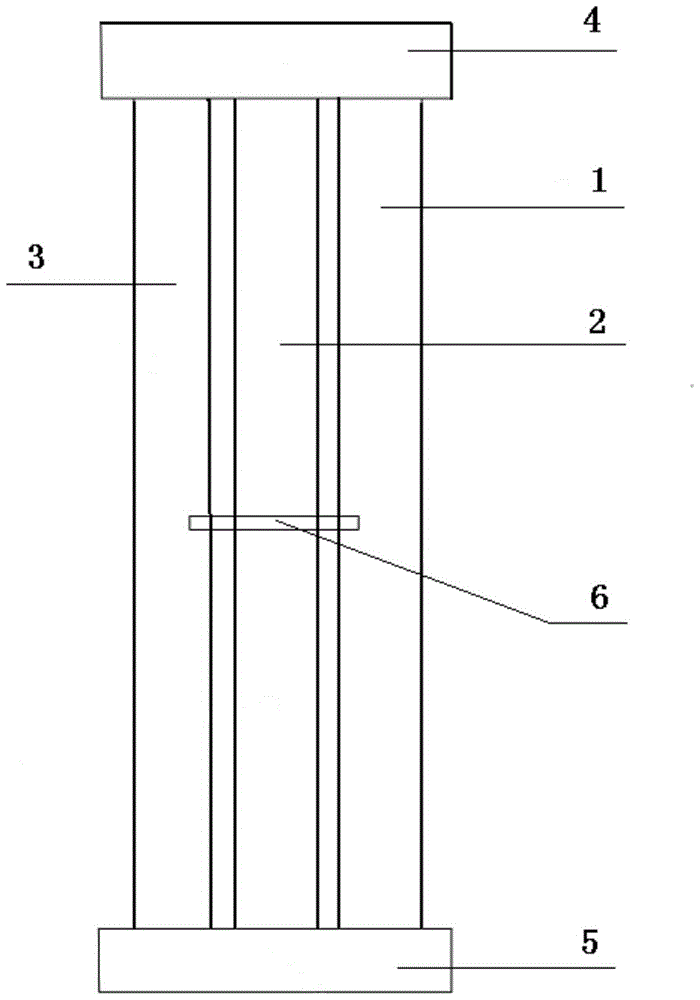
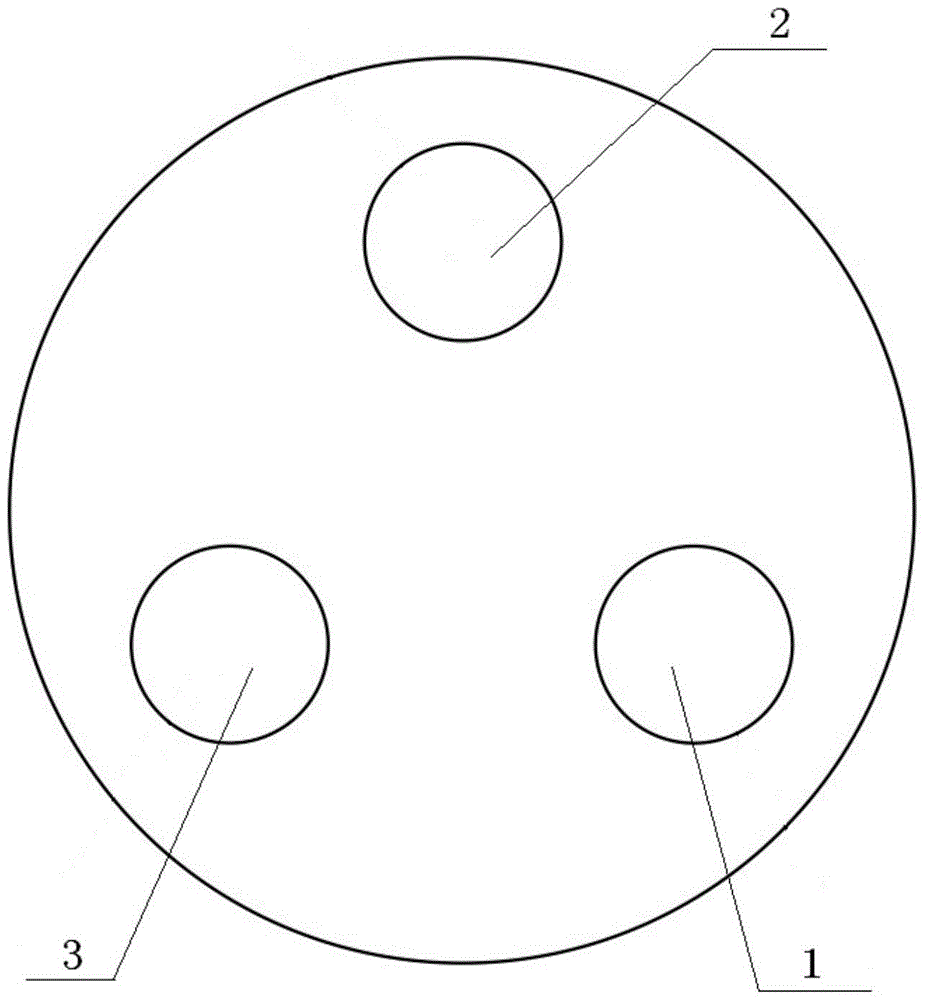
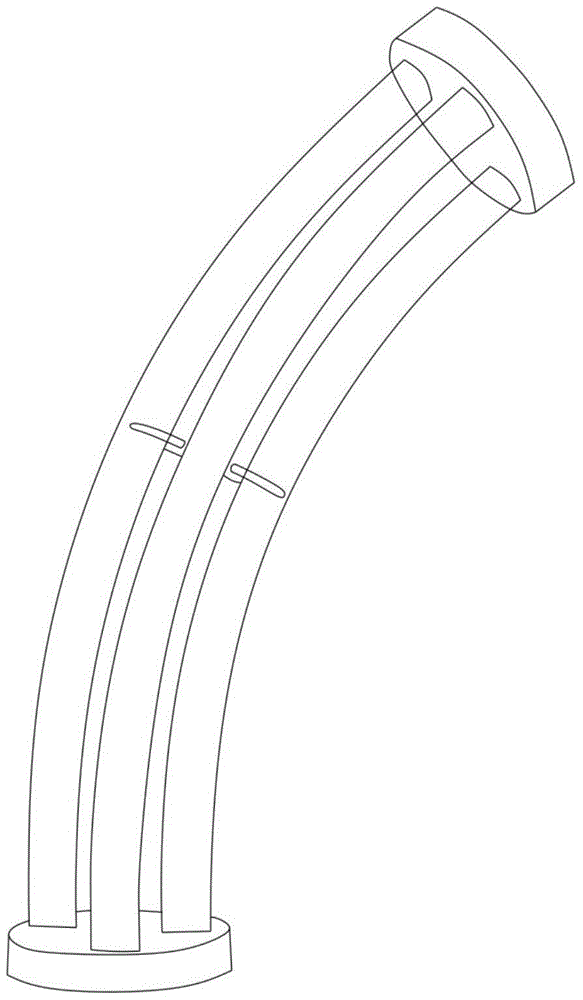
[0020] like figure 1 , figure 2 and image 3 As shown, a three-degree-of-freedom compliant actuator with a hybrid power source consists of three artificial pneumatic muscles A1, artificial pneumatic muscles B2, and artificial pneumatic muscles C3 arranged in parallel, the first end cover 4, the second end cover 5 and the central fixed The disk 6 is composed of the first end cover 4 and the second end cover 5 respectively arranged at the two ends of the artificial pneumatic muscle A1, the artificial pneumatic muscle B2 and the artificial pneumatic muscle C3, and the central fixed disk 6 is arranged on the artificial pneumatic muscle A1, the artificial pneumatic muscle The middle part of B2 and artificial pneumatic muscle C3 is used for fixing three artificial pneumatic muscles. By inflating any single or two artificial pneumatic muscles, the length of the three artifici...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - Generate Ideas
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com