Method for robot to intelligently avoid human under man-machine cooperation scene
A technology of robot intelligence and human-machine collaboration, applied in the direction of two-dimensional position/channel control, etc., can solve problems such as difficult to ensure real-time performance, limited technology application, and low recognition accuracy
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image



Examples
Embodiment Construction
[0051] The present invention will be further described below in conjunction with specific examples.
[0052] The robot intelligent avoiding human method in the human-machine collaboration scene described in this embodiment enables the operator to move freely in the robot workspace, and the robot actively avoids obstacles according to the operator's information obtained by Kinect. The system structure diagram is as follows figure 1 shown. The key of the inventive method is to construct the virtual robot model corresponding to the real man-machine collaboration scene and the operator model and the collision detection method of the robot model and the operator model, which comprises the following steps:
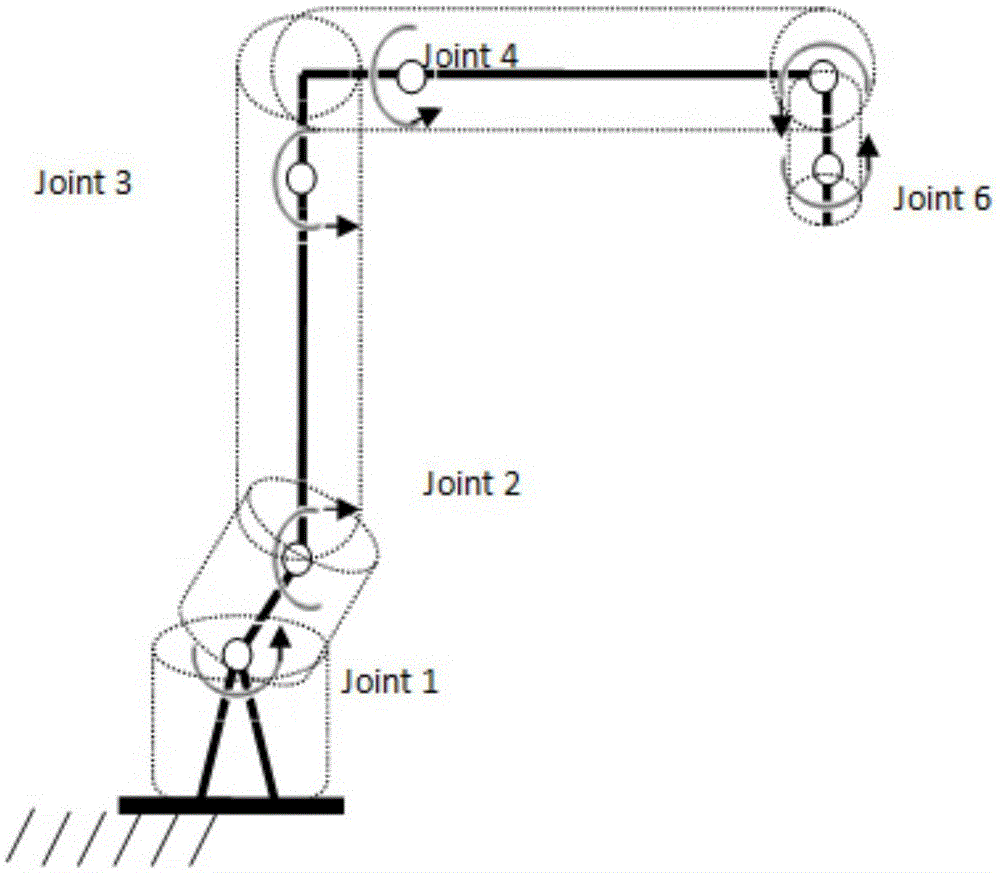
[0053] 1) Construct the robot cylinder model of the virtual scene through the robot D-H parameters, as follows:
[0054] Assuming that the robot is composed of a series of connecting rods and joints in any form, the D-H parameter represents the relationship between the robot jo...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - Generate Ideas
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com