Robot and method for cleaning external glass in room based on femtosecond laser
A femtosecond laser and robot technology, applied in the field of glass curtain wall cleaning, can solve the problems of low cleanliness, high difficulty in operation, and high risk, and achieve the effect of avoiding danger and solving high risk.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
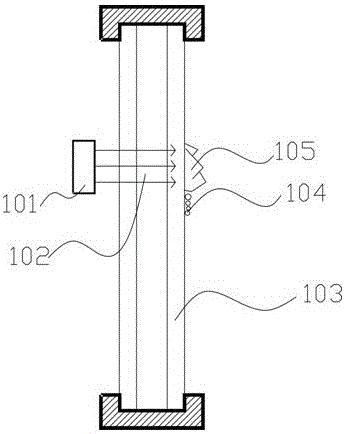
[0024] See figure 1 , the robot is placed on the inner surface of the glass (103), and can be close to the inner surface of the glass (103), or can keep a certain distance from the inner surface of the glass (103). When in use, the robot can be moved, that is, the control center controls the movement of the robot through a multi-degree-of-freedom motion mechanism; or only the probe of the femtosecond fiber laser (101) can be rotated.
[0025] The real-time monitoring system includes positioning instruments, imaging instruments, glass thickness and layer detection instruments and glass transmittance detection instruments. The positioning instrument is used to locate the dirt (105) and dust (104) on the outer surface of the glass (103), specifically a CCD-assisted femtosecond laser locator. The imaging instrument is used to image the dirt (105) and dust (104) on the outer surface of the glass (103), and display the image on the display unit connected to the control center. The ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com