All-landform walking device and control method thereof
A walker and landform technology, applied in the field of rehabilitation medicine, can solve the problems of complex design of leg and knee joints, unsuitable for practical application, and unsuitable for large-scale promotion, etc. Effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image



Examples
Embodiment Construction
[0034] The preferred embodiments of the present invention will be described in detail below in conjunction with the accompanying drawings; it should be understood that the preferred embodiments are only for illustrating the present invention, rather than limiting the protection scope of the present invention.
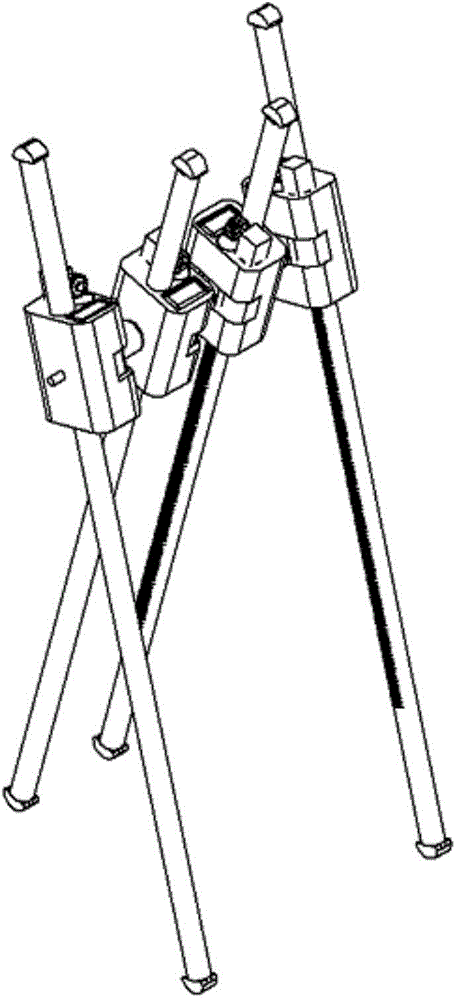
[0035] Such as figure 1 , 2 As shown, a kind of all-terrain walker includes at least four sets of running gear units connected in sequence; the running gear unit includes a straight leg 1 for walking and a hip 2 that drives the straight leg to move up and down and swing, and the hip The parts are connected by coupling 3. The walking device of the present invention utilizes the self-stability of passive walking, the dynamic characteristics of natural gait, high efficiency and energy saving, not only can realize multi-terrain (plane, slope, concave-convex surface, etc.) walking, but also can realize obstacle-crossing function.
[0036] In this implementation, the hip in...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com