Semi-passive walking device and control method thereof
A walking device and semi-passive technology, applied in the field of rehabilitation medicine, can solve the problems of complex design of leg knee joints, unsuitable for practical application, complex self-locking structure, etc., and achieve the effects of flexible legs, stable walking, and exquisite design.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0030] A non-limiting embodiment is given below in conjunction with the accompanying drawings to further illustrate the present invention. It should be understood, however, that these descriptions are exemplary only, and are not intended to limit the scope of the invention. Also, in the following description, descriptions of well-known structures and techniques are omitted so as not to obscure the concept of the present invention.
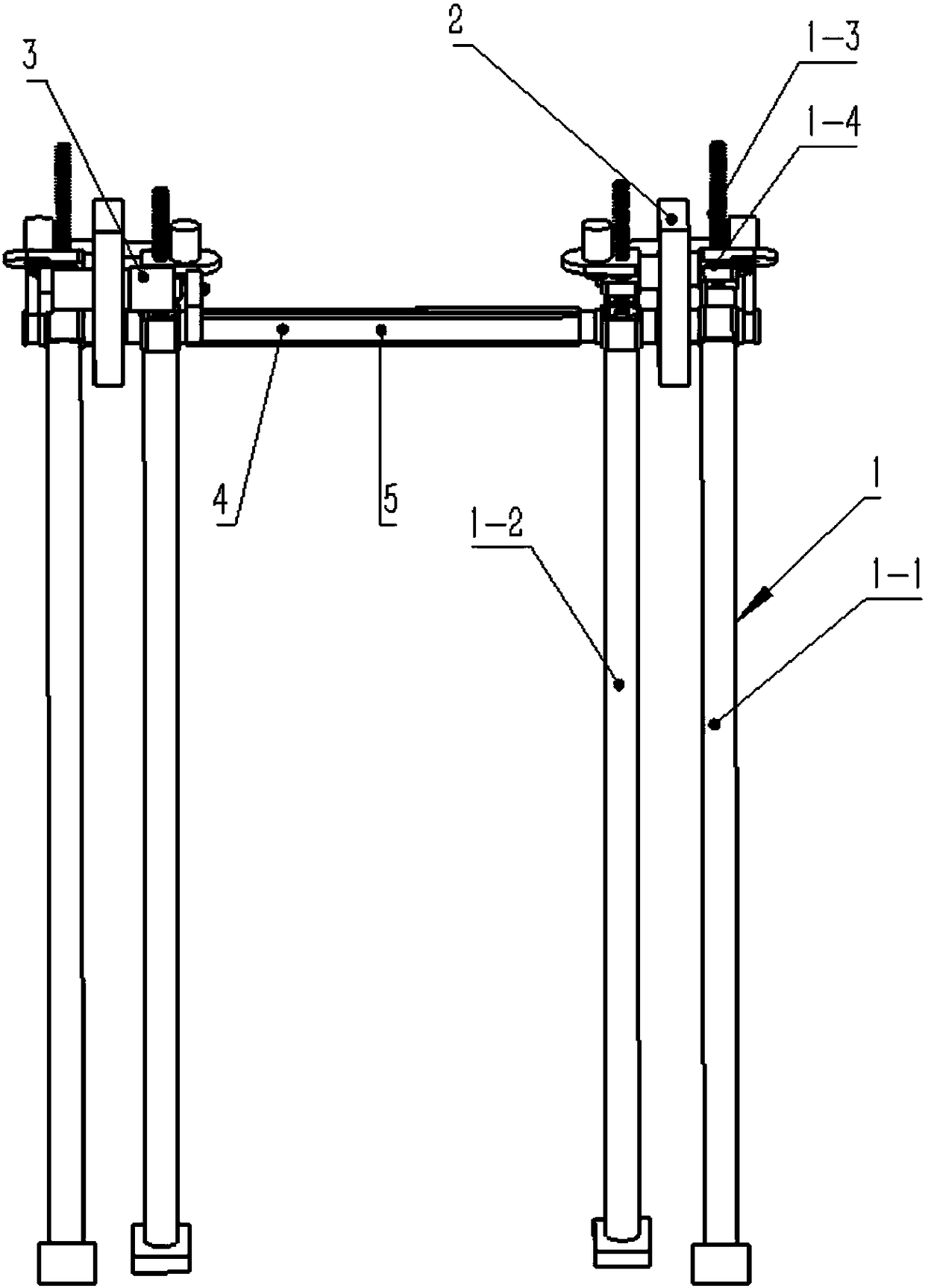
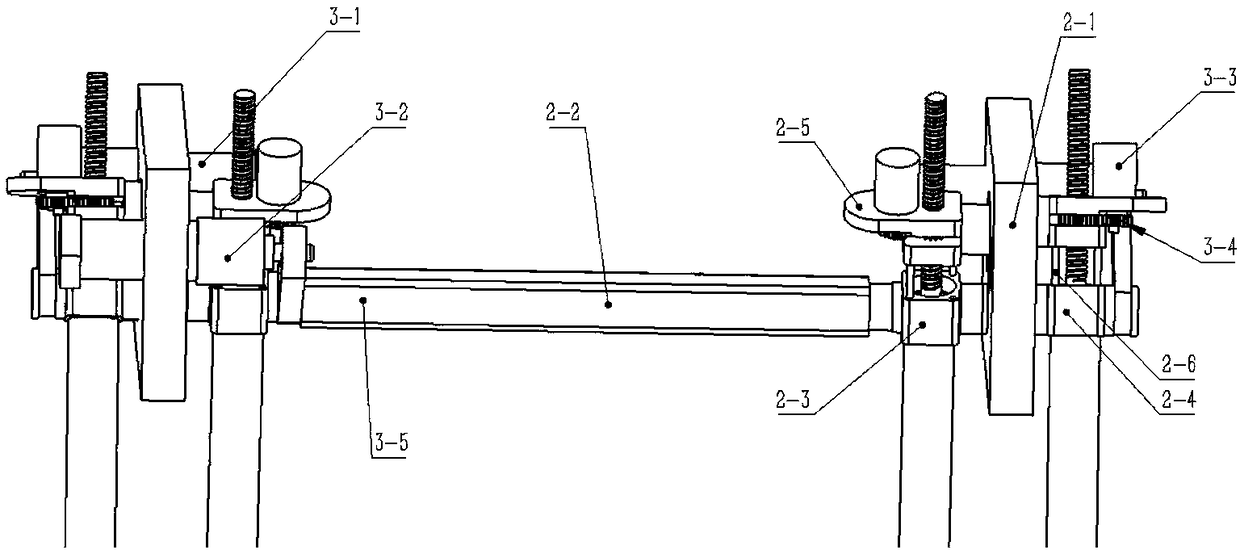
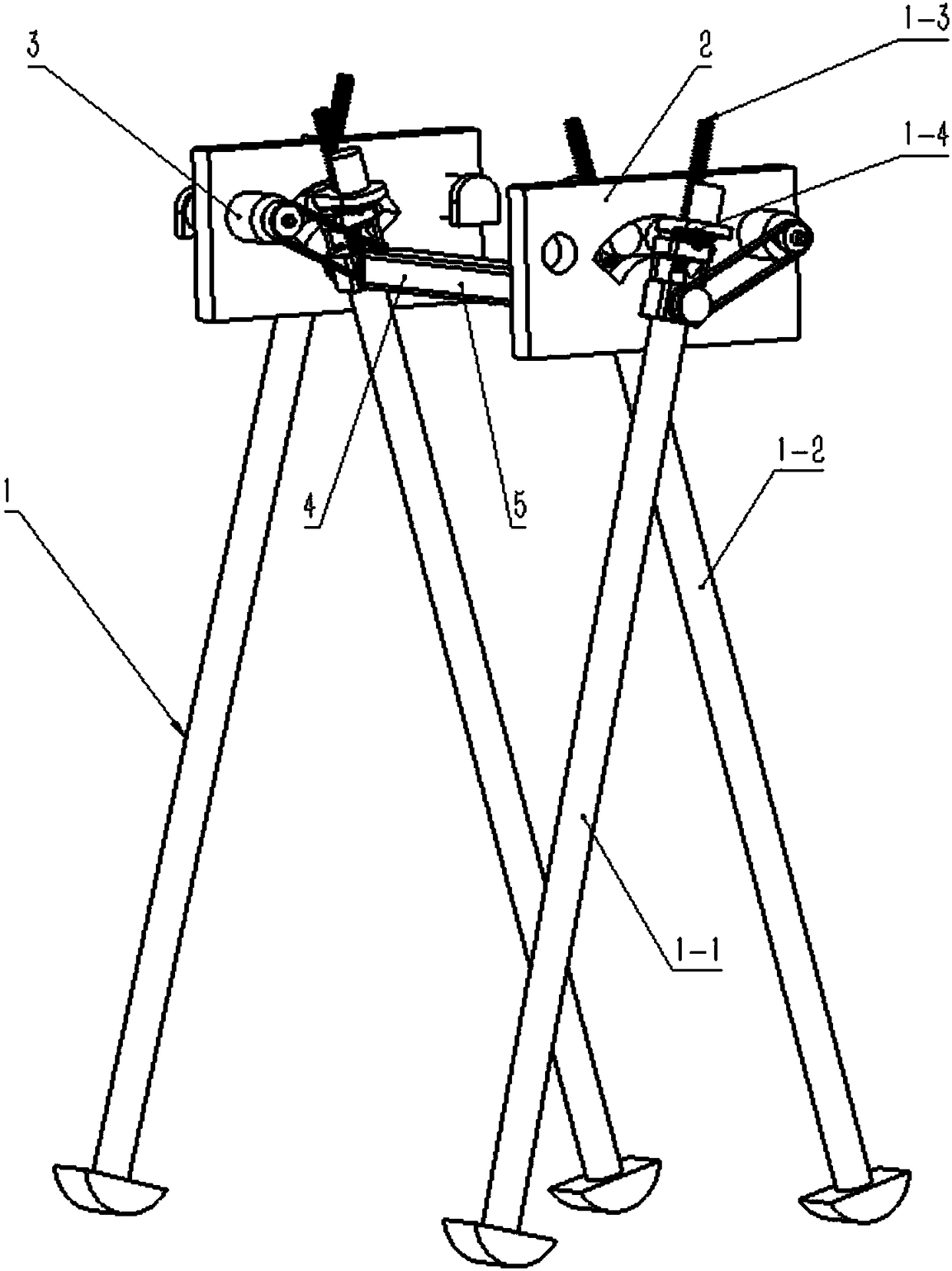
[0031] Such as figure 1 , figure 2 , image 3 with Figure 4 As shown, for the semi-passive walking device of the present invention, it is a quadruped walking device, including a running gear, a driving device 3 for driving the running gear to walk, a data acquisition device 4 for collecting walking data of the running gear, and providing for walking The main control device 5 of the real-time walking scheme, the walking mechanism includes a leg 1 and a hip 2, and the hip 2 includes a support plate 2-1, a connecting rod 2-2, a linear bearing A2...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com