Attitude control method for propeller unmanned drone aircraft based on adaptive control
A technology of adaptive control and attitude control, applied in the direction of attitude control, etc., can solve the problems of being susceptible to external interference, adjusting overshoot and adjusting time can not be excellent at the same time
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0035] The technical solutions of the present invention will be described in detail below in conjunction with the accompanying drawings and embodiments.
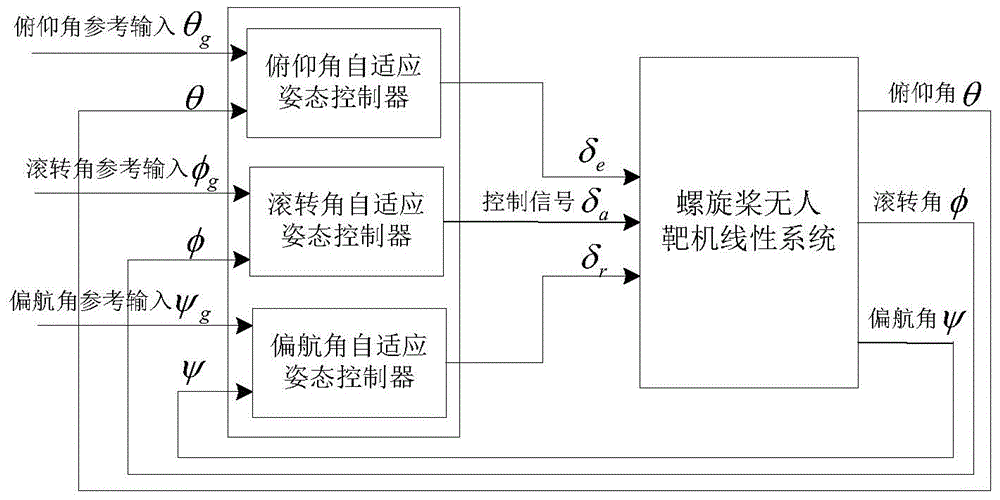
[0036] figure 1 , gives the structural block diagram of the propeller unmanned target drone flight system. The UAV linear state space equation is obtained by linearizing the UAV nonlinear system according to the UAV flight height and airspeed; the adaptive attitude controller is the core of the UAV control system. The UAV nonlinear system is built using the S function in MATLAB software, and then according to the altitude and airspeed of the UAV in flight, the linearization model of the UAV is calculated by using the linearized linmod() function in MATLAB. expressed in state-space form.
[0037] Each adaptive control channel has two inputs, one is the reference input signal of each attitude angle, and the other is the actual attitude angle calculated by the UAV system; the output of the controller is the three The control...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com