Transformer station inspection tour robot positioning navigation system and method
A patrol robot, positioning and navigation technology, applied in navigation calculation tools, two-dimensional position/channel control, instruments, etc., can solve the problem of low positioning accuracy
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0083] The present invention is described in detail below in conjunction with accompanying drawing:
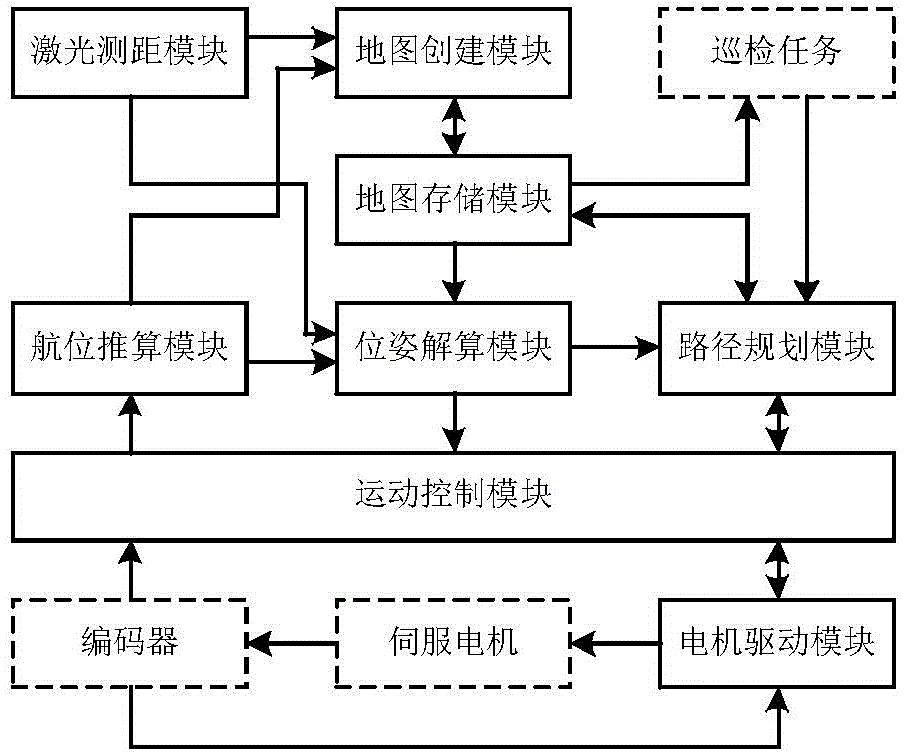
[0084] like figure 1 Shown: A substation inspection robot positioning and navigation system, including: laser ranging module, dead reckoning module, map creation module, map storage module, positioning calculation module, path planning module, motion control module, motor drive module.
[0085] The functions and data connections of each module are as follows:
[0086] Laser ranging module: It consists of a laser ranging sensor fixedly installed on the robot body, and is used to measure the distance information of obstacles around the robot relative to the scanning center of the laser sensor. The acquired data is connected to the map creation module, pose calculation module and path planning module.
[0087] Dead reckoning module: convert the pulse data of the robot drive motor shaft encoder sent by the motion control module into the moving distance and attitude change of the...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - Generate Ideas
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com