A Fault Tolerant Planning Method for Acceleration Layer of Redundant Manipulator
An acceleration and manipulator technology, applied in the field of redundant manipulator fault-tolerant planning and control, it can solve the problems of inability to avoid obstacles and eliminate manipulators, achieve obstacle avoidance, eliminate the possibility of physical damage, In-depth and rigorous effect of the derivation process
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0024] The present invention will be further described below in conjunction with the accompanying drawings.
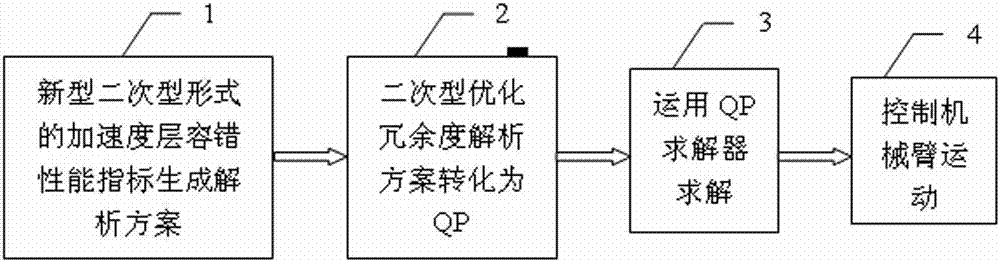
[0025] Such as figure 1 As shown, the fault-tolerant planning method of the redundant manipulator of the present invention first proposes the fault-tolerant performance index and constraints of the acceleration layer; then converts it into a corresponding QP; then applies the QP solver to solve; finally, the lower computer controller controls the Movement of the robotic arm.
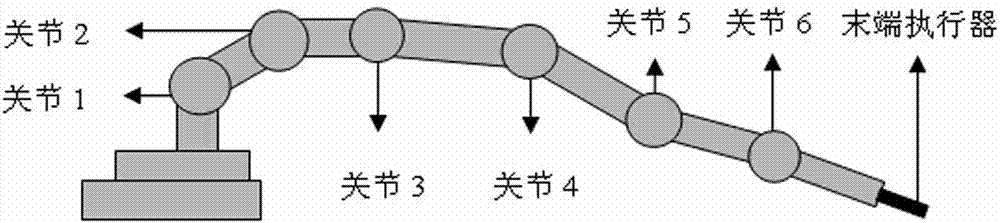
[0026] See figure 2 As shown, the mechanical arm realizing the present invention is a planar six-link mechanical arm;
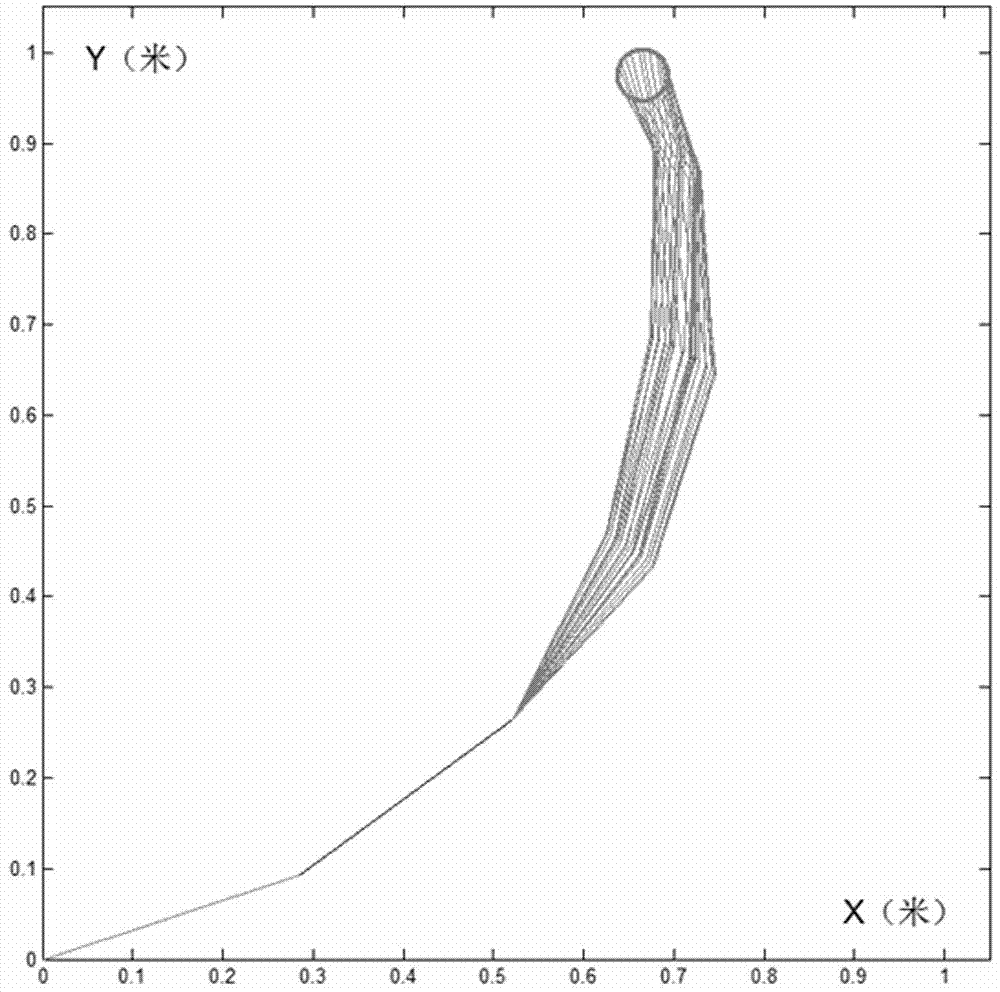
[0027] See image 3 As shown, it is a fault-tolerant schematic diagram of a planar six-link manipulator; a given terminal task is to draw a planar circle, and when both joints 1 and 2 fail to lock, the other joints will be adjusted to the optimal trajectory in time to ensure that the mechanical The end of the arm performs the task of drawing a circle.
[0028] See Figure...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - Generate Ideas
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com