Multifunctional limb intelligent rehabilitation machine and computer auxiliary control method thereof
A rehabilitation machine and multi-functional technology, applied in medical science, sensors, passive exercise equipment, etc., can solve the problems of rarely using control links, patients miss the best time, and calibration parameters cannot be determined, so as to shorten the recovery time, The effect of improving the effect and relieving pain
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
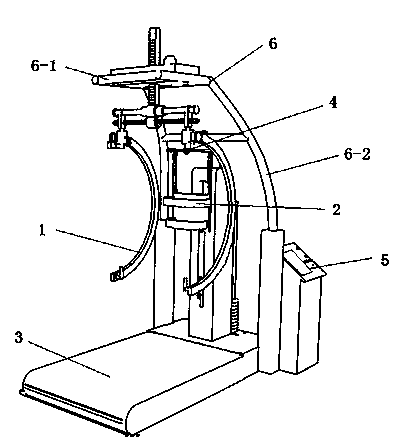
[0032] Such as figure 1 As shown, according to the basic needs in the process of rehabilitation treatment for patients with physical disabilities, the main design of this rehabilitation equipment includes upper limb rehabilitation mechanism 1, induction crawler walking machine 3, weight loss protection squat rehabilitation mechanism 2, cervical traction device 4, computer 5 and a frame 6; the frame 6 includes a top frame 6-1 and two branch bars 6-2, one end of the branch bar 6-2 is fixedly connected to the top frame 6-1, and the other end is connected to the ground; Upper limb rehabilitation mechanism 1, induction crawler walking machine 3, weight loss protection squatting rehabilitation mechanism 2, cervical traction device 4 are all located on the side of the two branch bars 6-2 of the frame, and the computer 5 is located on the two branch bars of the frame 6-2 The other side: the induction crawler walking machine 3 is located below the upper limb rehabilitation mechanism 1,...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com