A Quadrotor Aircraft Attitude Acquisition Method Using Third-Order Approximate Picard Quaternion
A four-rotor aircraft, third-order approximation technology, applied in attitude control, navigation through speed/acceleration measurement, navigation calculation tools, etc., can solve problems such as difficult real-time calculations, large calculations, and small calculations of quaternion methods
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0072] In order to make the technical scheme and design idea of the present invention clearer, a detailed description will be given below in conjunction with the accompanying drawings.
[0073] A method for acquiring the attitude of a quadrotor aircraft using a third-order approximate Picard quaternion, comprising the following steps:
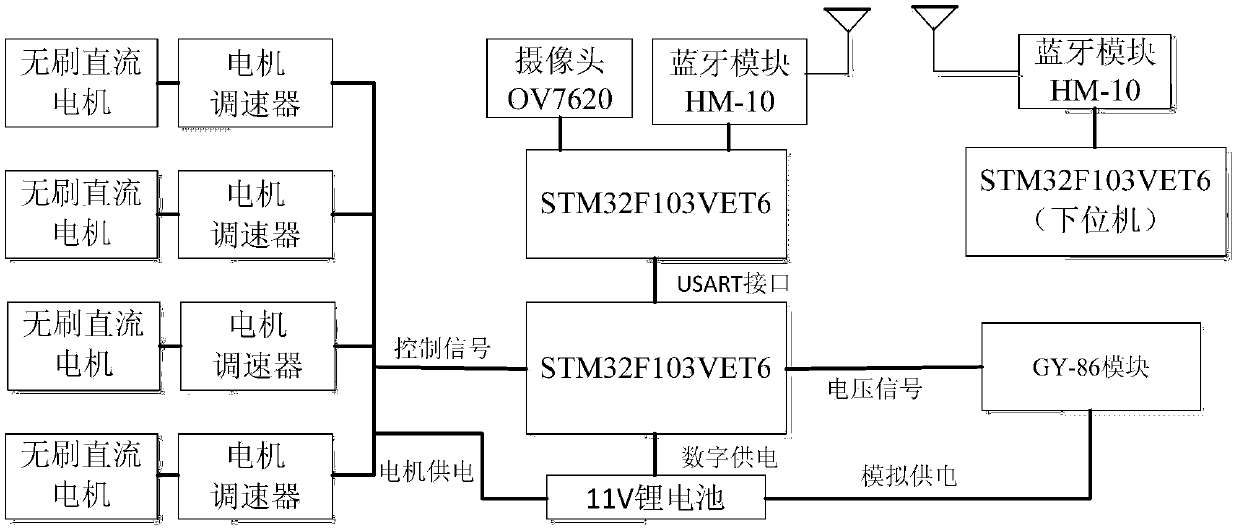
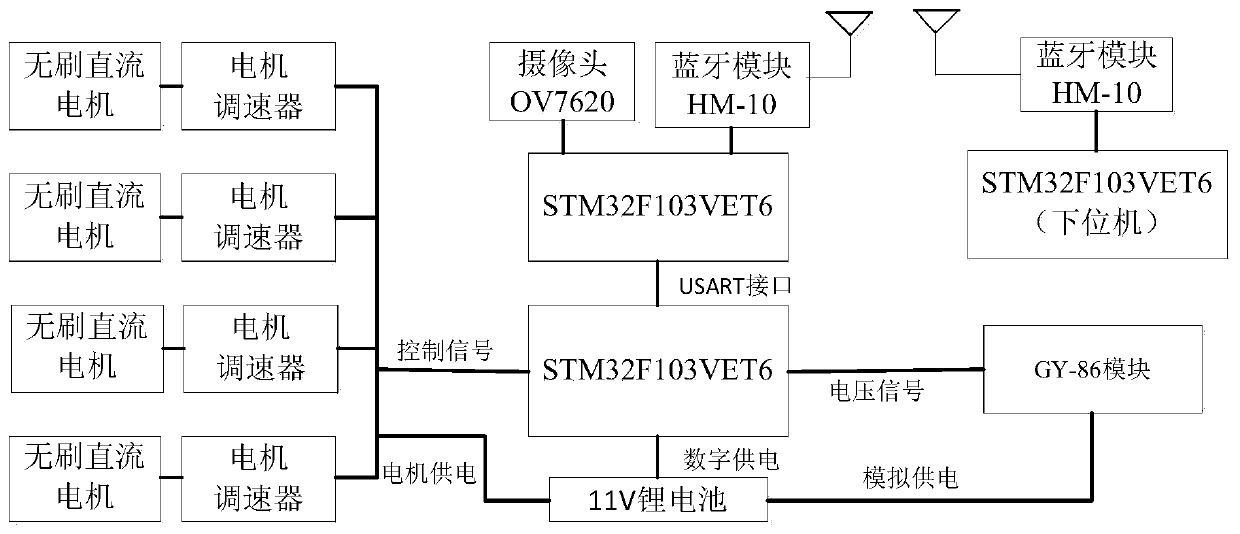
[0074] Step 1) In order to verify the feasibility of the algorithm, an aircraft experiment platform is first established, and the hardware system of the platform is divided into three parts with three STM32F103VET6 control chips as the core.
[0075] The first part is the circuit design of the main controller and inertial navigation system. The main control chip uses STM32 for attitude acquisition and attitude control. The inertial navigation system collects the motion state information of the aircraft body as an important information basis for the control system. The feedback accuracy of the inertial navigation platform directly affects th...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com