Indoor map building method for improving robot path planning efficiency
An indoor map and path planning technology, applied in the field of indoor robots, can solve the problems of lack of specific information of the environment, difficulty in adapting to positioning, etc., and achieve the effect of avoiding planning and path planning algorithms being simple and efficient
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image



Examples
Embodiment 1
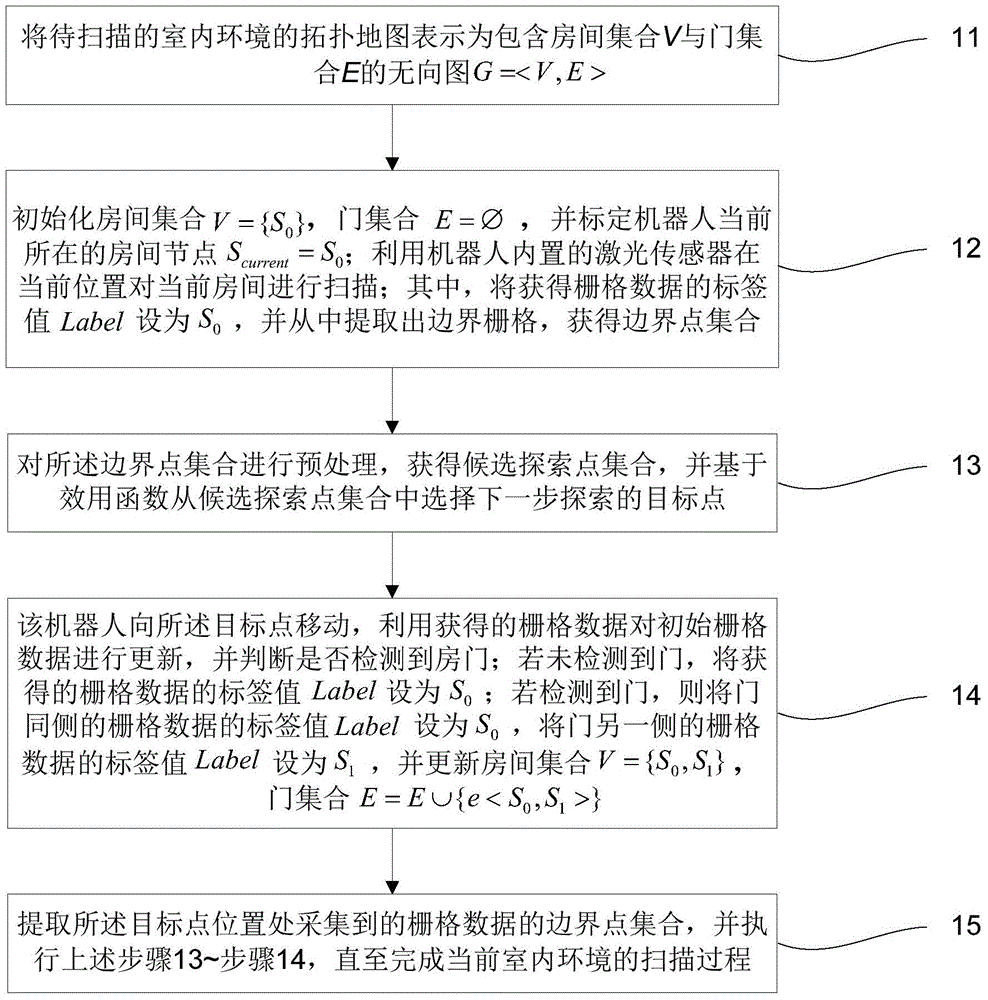
[0046] figure 1 An indoor map construction method that improves the efficiency of robot path planning is provided by an embodiment of the present invention. Such as figure 1 As shown, the method mainly includes the following steps:
[0047] Step 11. Express the topological map of the indoor environment to be scanned as an undirected graph G= including a room set V and a door set E.
[0048] The topological map established in the embodiment of the present invention uses rooms as nodes and doors between rooms as edges. In this solution, the topological map is established based on the detection of doors and the real-time movement of the robot, and a grid map is created at the same time.
[0049] In the indoor environment, different rooms can be distinguished by the position of the door, and the existing room segmentation methods are all based on extracting geometric features such as line segments, corner points, and polygons on the existing grid map, which is complex to calcula...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com