Unmanned aerial vehicle flight trajectory tracking control system
A technology of flight trajectory and tracking control, which is applied in three-dimensional position/course control and other directions, and can solve the problems of complex control parameter design process and many control parameters
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0036] A drone flight trajectory tracking control system proposed by the present invention will be described in detail below in conjunction with the accompanying drawings.
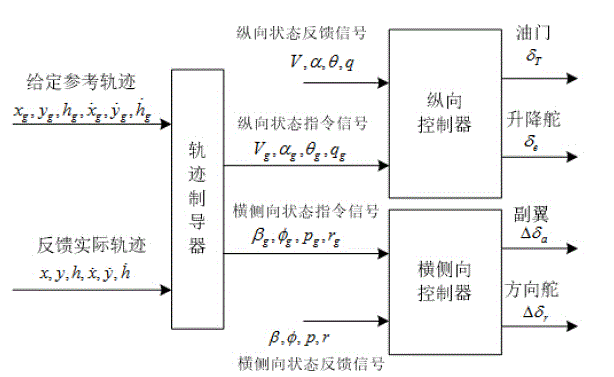
[0037] The invention proposes an unmanned aerial vehicle flight trajectory tracking control system based on information fusion control theory. Information fusion control theory is to examine the control problem from the perspective of decision-making or estimation, all the constraint information about the control quantity is regarded as the sensing information about the control quantity (the estimated quantity), and the control quantity is estimated from this, which is called Fusion control amount. These constraints usually appear in the form of a certain index function reaching the extreme value, so the fusion solution is usually the optimal solution. Therefore, information fusion control is an optimal control, which is suitable for multivariable systems such as UAVs.
[0038] Such as figure 1 As shown...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com