Mobile robot visual servo control method based on key frame strategy
A mobile robot and visual servo technology, applied in the field of robotics, can solve problems such as poor navigation accuracy and error accumulation
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment
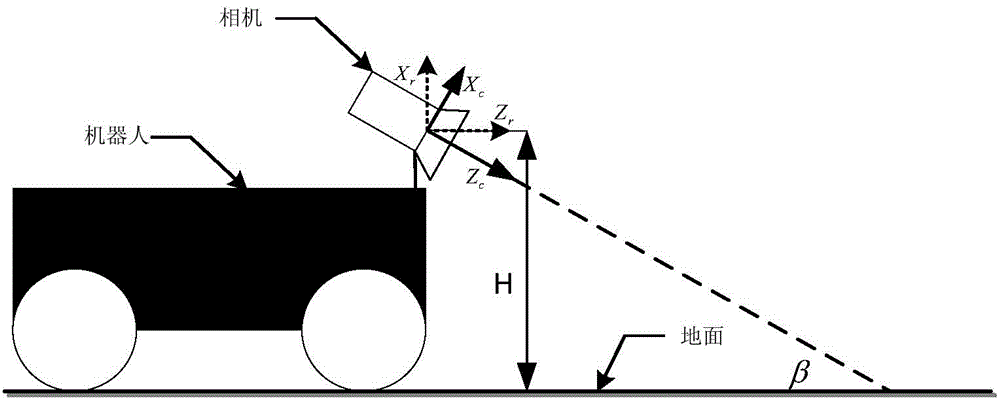
[0130] Image 6 and Figure 7 It shows the running result of the improved method, and the given conditions are: the starting pose is (0,0,0), and the ending pose is (150,200,0.1). Relevant parameters take: y ICR l = 10 cm , y ICR r = - 10 cm , z ICR = 50 cm , The angle between the optical axis of the camera and the ground is β=pi / 5, the height of the camera center from the ground is d=10cm, f u , f v Both are 500, robot v max =100cm / s, sampling period T=0.01s, the prediction time domain of controller is N=20, Q=I 4×4 , R=0.1×I 2N×2N .
[0131] After the robot starts to run, it first plans a moving path that satisfies the nonholonomic constraints of the robot based on the know...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com