Predictive control method and predictive control device for piezoelectric ceramic actuator based on fuzzy TS (Takagi-Sugeno) model
A technology of predictive control and piezoelectric ceramics, which is applied in the direction of adaptive control, general control system, control/regulation system, etc., can solve problems such as large amount of calculation, influence of inverse model accuracy, difficulty in applying response speed to piezoelectric ceramic actuators, etc. , to achieve the effect of reducing the amount of calculation, reducing the burden of calculation, and real-time precise control
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
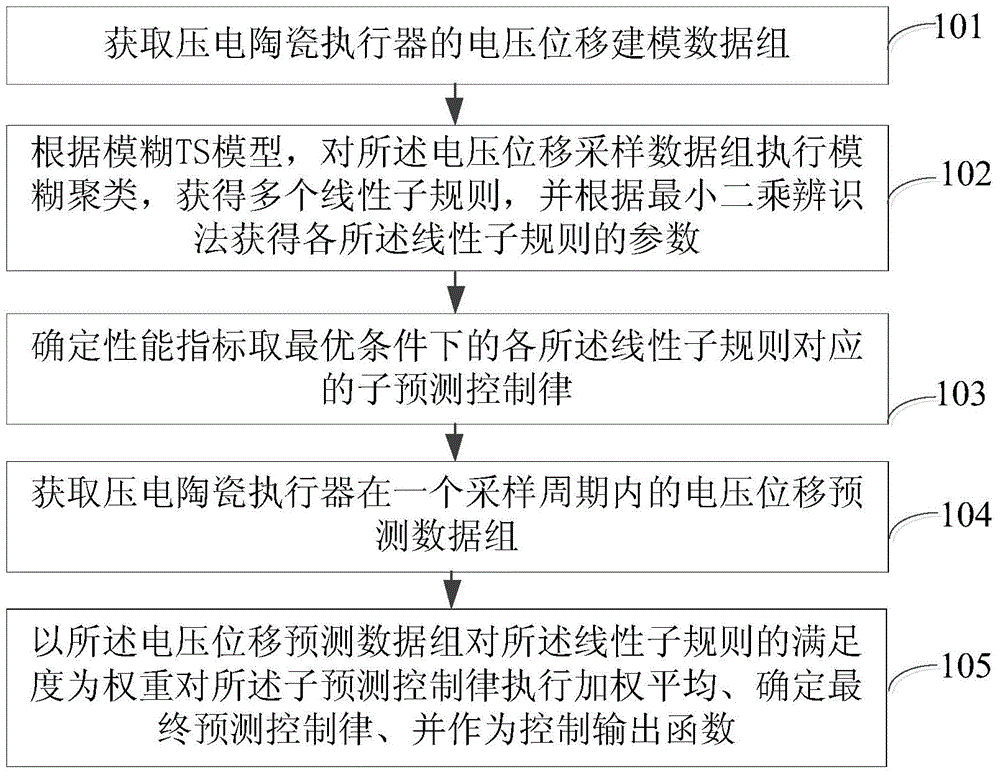
[0022] figure 1 It is a flow chart of Embodiment 1 of the predictive control method of the piezoelectric ceramic actuator based on the fuzzy TS model of the present invention, such as figure 1 Shown, the present invention is based on the predictive control method of the piezoelectric ceramic actuator of fuzzy TS model, comprises:
[0023] S101. Obtain the voltage displacement modeling data set of the piezoelectric ceramic actuator, preferably, including:
[0024] Obtain the voltage and displacement of the piezoelectric ceramic actuator, and express the voltage displacement data group in the form of the preceding vector:
[0025] X=[y(t-1),y(t-2),...,y(t-n y ),u(t),u(t-1),…,u(t-n u )]∈R p (1)
[0026] where n y is the maximum delay corresponding to the output y, n u is the maximum delay corresponding to the input quantity u, and the acquisition of the voltage and displacement of the piezoelectric ceramic actuator includes:
[0027] Converting the voltage excitation s...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com