Manipulator with adjusting structure
A technology for adjusting the structure of a robot arm, which is applied in the field of robotics, can solve the problems such as the fixed length of the support rod 132, which cannot be adjusted, and the lack of applicability, and achieve the effects of increasing the application range, reducing costs, and operating quickly
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0049] In order to further explain the technical solution of the present invention, the present invention will be described in detail below through specific examples.
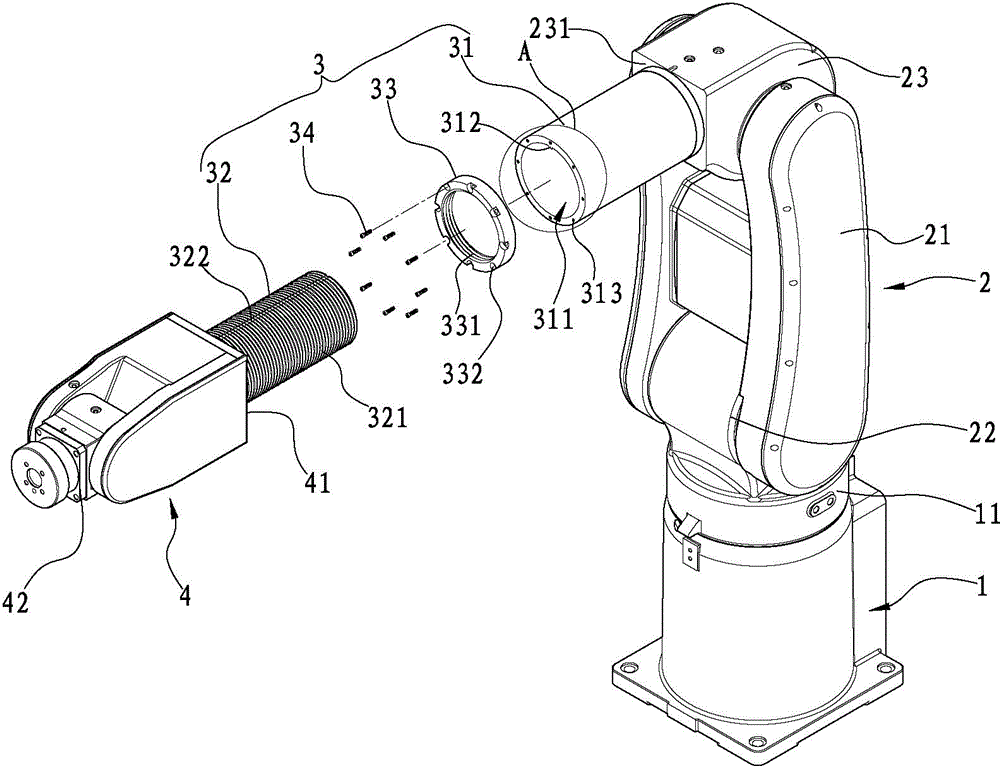
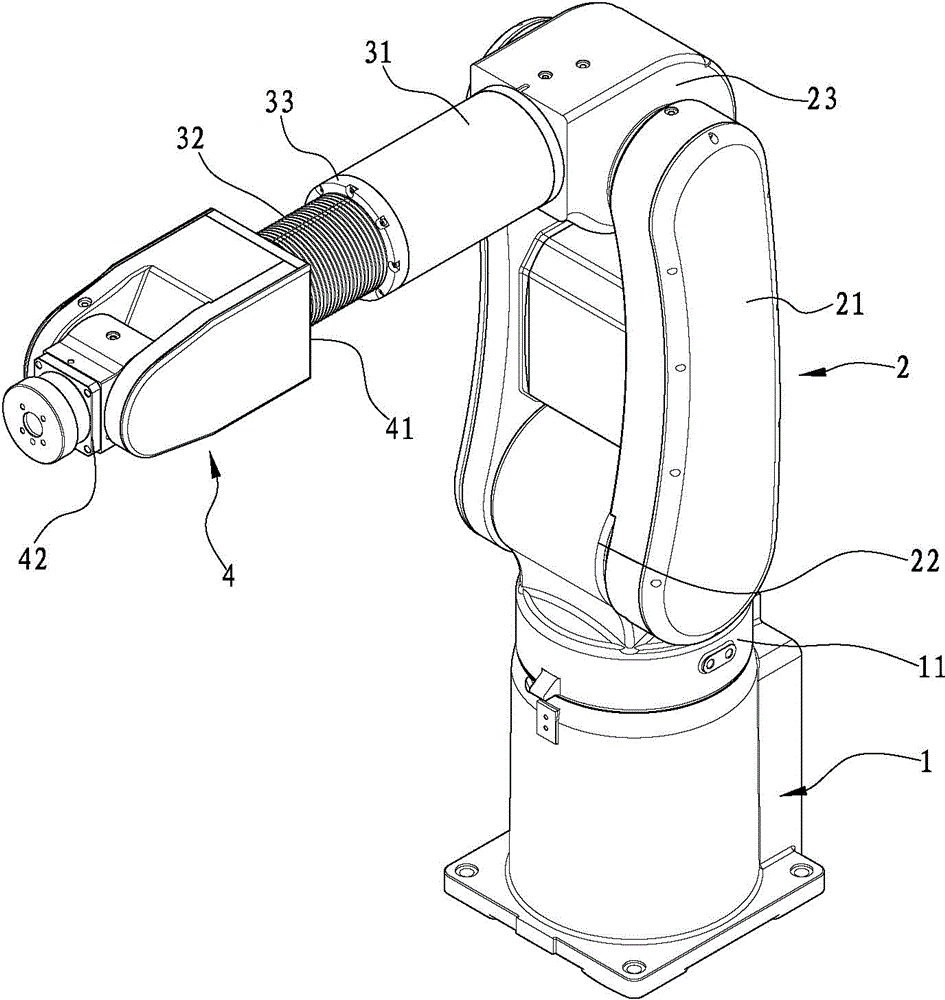
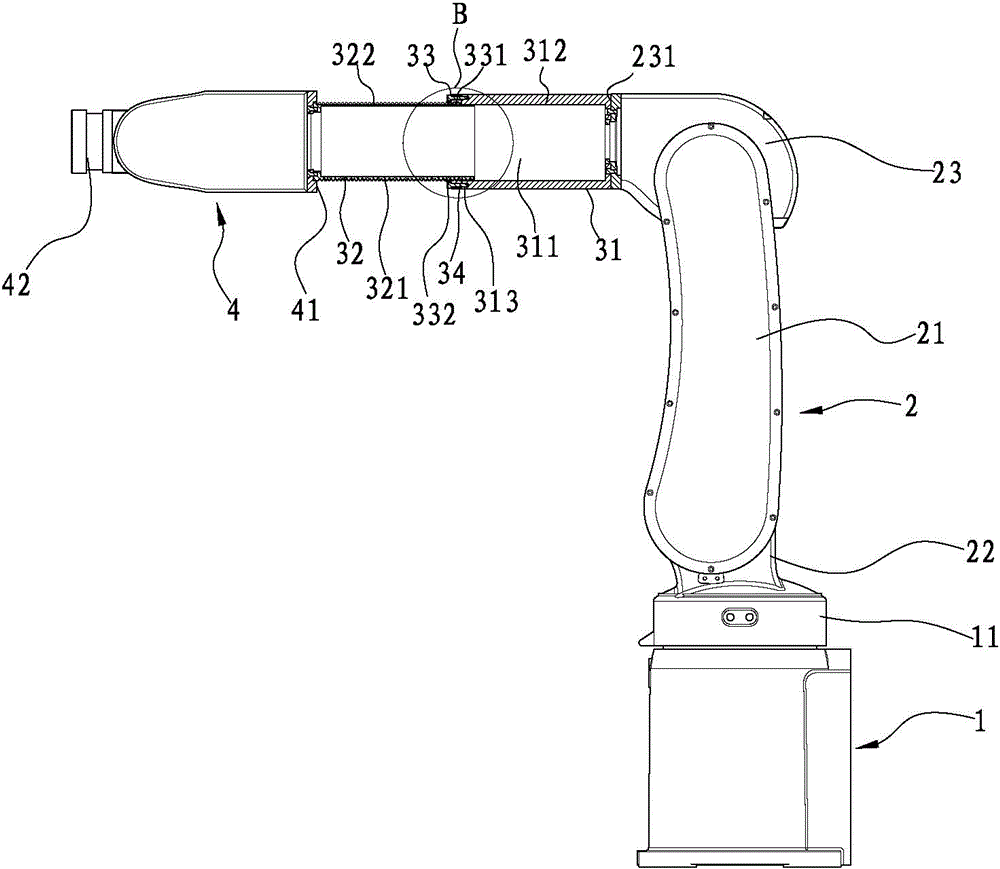
[0050] see Figure 1 to Figure 4As shown, it is a diagram of the first preferred embodiment of the present invention. The present invention is a robot arm with an adjustable structure, including: a mobile base with multiple degrees of freedom in operation. The mobile base is used in this embodiment Examples include: a base 1, which has a first pivot 11, which can rotate at any angle; a first arm 2, which includes a connecting arm 21, a second pivot 22 and a third Pivot 23, the second pivot 22 and the third pivot 23 are respectively located at the two ends of the connecting arm 21, and the second pivot 22 is connected with the first pivot 11, so that the first arm 2 is fixed On the base 1; an adjustment module 3, one end of which is linked with the first coupling surface 231 of the third pivot portion 23, the a...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com