
Patsnap Eureka
For R&D, Patsnap Eureka makes reading and utilizing patents & technical documents easy.
Patsnap Eureka AIR
Designed for self-driven R&D workflows. Generate viable solutions, solve complex R&D challenges, empower your innovation with AI.

Patsnap Eureka Materials
Designed for material experts only. Revolutionize your material R&D, from search, analyze, to developing new materials.

TechResearch
Generate reliable direction feasibility study reports for your R&D in just a few steps.

TechSeek
Discover and master advanced knowledge NOW. Basics, ideas, possibilities, all at once.

TechMind
As an expert in R&D Theories, TechMind can generates customized viable solutions instantly.

TechRisk
Analyze your overall solution with one click, know your potential R&D risks in advance.

TechMonitor
Get weekly tech updates, stay abreast of the latest tech innovations and key insights.
Method for programming flight paths with introduced intention of pilots
A technology for trajectory planning and pilots, applied in three-dimensional position/channel control and other directions, which can solve the problems of complex meteorological condition modeling, increased calculation amount, large amount of data, etc.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0059] The present invention will be further explained below in conjunction with the drawings:
[0060] In order to facilitate the description of the problem, the following assumptions are made:
[0061] Hypothesis 1: All obstacles in the environment can be detected by the aircraft, and the obstacles are modeled and characterized by convex polyhedrons;
[0062] Assumption 2: Assuming that the aircraft is a particle, its safe area is obtained by extending the boundary of the obstacle;
[0063] Hypothesis 3: All possible collisions can be detected by the aircraft, that is: for each aircraft involved in a possible collision, its position and speed are known to each other; the constraint conditions for avoiding collisions are mutual minimum safety Distance representation.
[0064] In order to facilitate the direct application of the following formula, first define each character as follows:
[0065]
[0066]
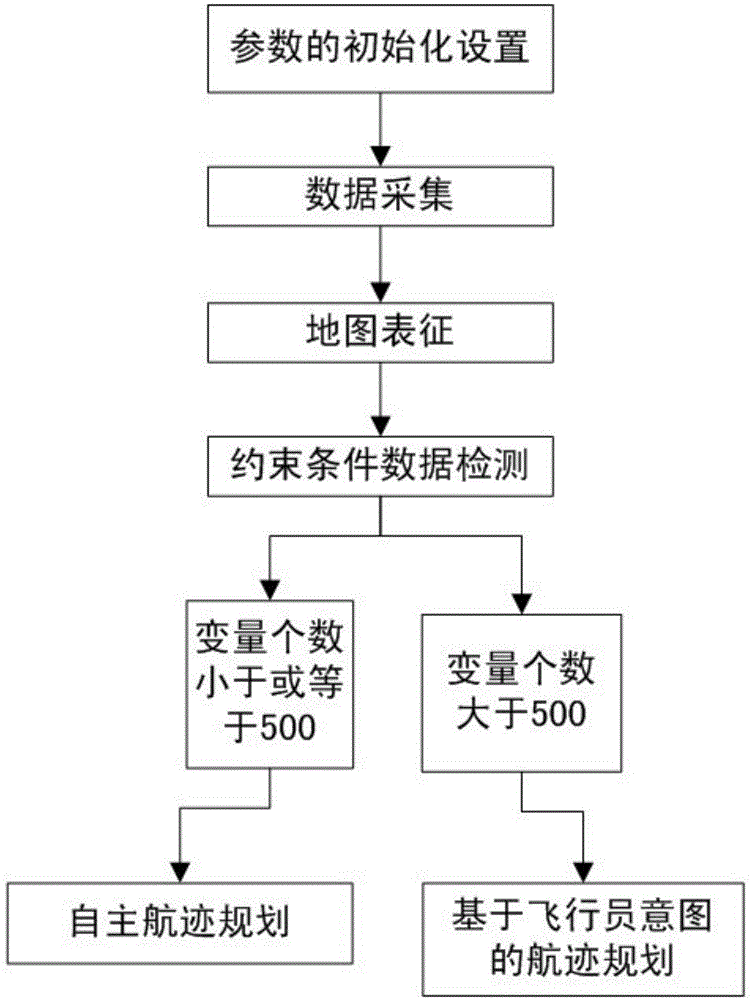
[0067] Such as figure 1 As shown, the route planning method for introducing pilo...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D Engineer
- R&D Manager
- IP Professional
- Industry Leading Data Capabilities
- Powerful AI technology
- Patent DNA Extraction
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2024 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com