Dynamic anti-saturation pitch angle control method for autonomous underwater vehicle
A technology of underwater vehicle and control method, applied in attitude control and other directions
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment Construction
[0036] Describe the present invention below in conjunction with specific embodiment:
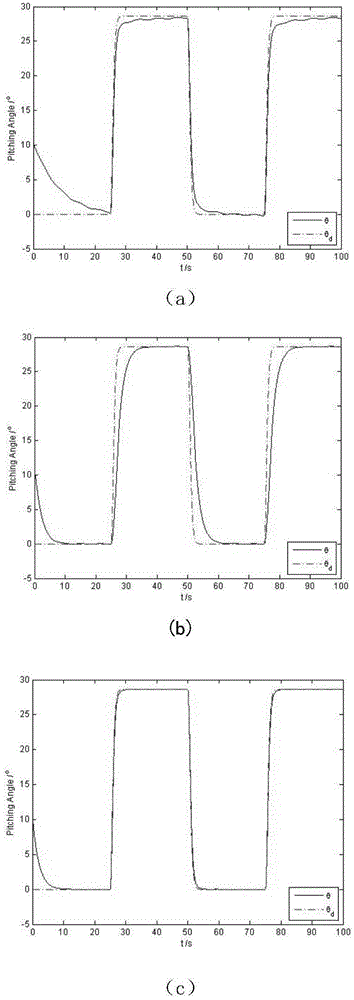
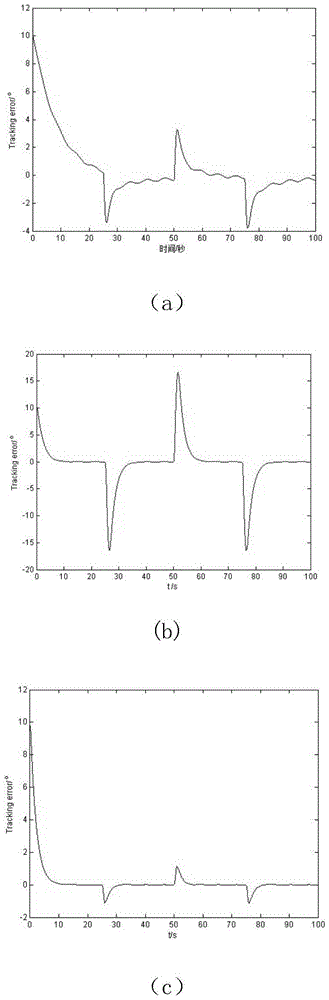
[0037] In this embodiment, the model parameters are set according to a certain type of AUV: c 1 =-4.695,c 2 = 10.735, c 3 = -1.8207, c 4 =0.2623,c 5 =-1.274, c 6 =-0.102, where c 1 , c 2 The value of is the value set in the simulation modeling, in the actual control, it is considered that c 1 , c 2 The value of is unknown. The initial state is set to θ (0) = 10°, ω z(0) = 3° / s. The initial state of the estimated parameters is: The desired pitch angle is a filtered square wave with an amplitude of 28.7°. τ=20, k=0.02, λ=1. Set the maximum output of the actuator as u m = 12°.
[0038] First, ignoring the coupling of the pitching motion and rolling motion of the underwater vehicle, the pitching motion model of the underwater vehicle is established:
[0039] θ · = ω z
[0040] ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com