Modified variable-structure grid interaction multi-model filtering method for tracking hypersonic-speed target of near space
An interactive multi-model and adjacent space technology, applied in the field of modified variable structure grid interactive multi-model filtering, can solve problems such as the inability to achieve high-precision and fast tracking of hypersonic maneuvering targets in adjacent space
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
specific Embodiment approach 1
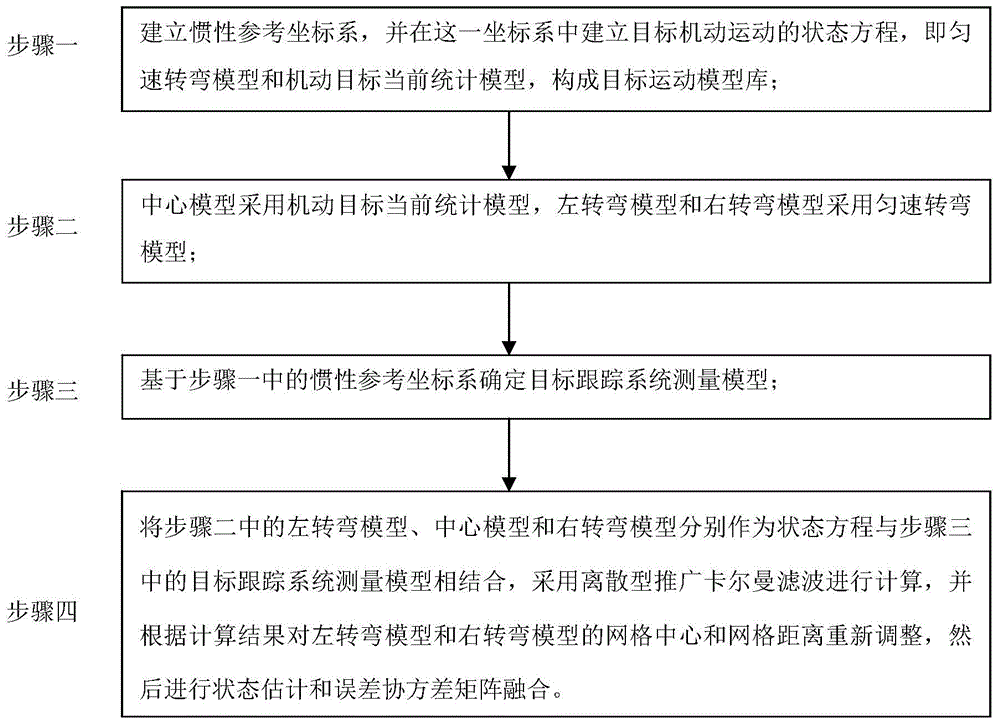
[0028] Specific implementation mode one: combine figure 1 Describe this embodiment, a modified variable-structure grid interactive multi-model filtering method for tracking hypersonic targets in adjacent space, which is specifically carried out in accordance with the following steps:
[0029] Step 1, establish an inertial reference coordinate system, and establish the state equation of the target maneuvering motion in the inertial reference coordinate system, that is, the uniform speed turning model and the current statistical model of the maneuvering target to form a target motion model library;
[0030] Step 2, the central model adopts the current statistical model of the maneuvering target in the step 1, the left-turn model and the right-turn model adopt the uniform speed turning model in the step 1, and constitutes a modified variable structure filter by the central model, the left-turn model and the right-turn model;
[0031] Step 3, determining the measurement model of t...
specific Embodiment approach 2
[0033] Embodiment 2: The difference between this embodiment and Embodiment 1 is that an inertial reference coordinate system is established in the step 1, and the state equation of the maneuvering motion of the target is established in the inertial reference coordinate system, that is, the uniform turning model and the maneuvering target The current statistical model constitutes the target motion model library; the specific process is:
[0034] The motion state vector of the object in the adjacent space in the establishment of the inertial reference coordinate system is taken as:
[0035] X k = x k x · k x ...
specific Embodiment approach 3
[0078] Specific embodiment three: the difference between this embodiment and specific embodiment one or two is that: the center model in the step two adopts the current statistical model of the maneuvering target, the left-turn model and the right-turn model adopt a uniform speed turning model, through the center model, The left-turn model and the right-turn model constitute a modified variable structure filter; the specific process is:
[0079] (1) The central model adopts the current statistical model (CS) of the maneuvering target,
[0080] Solve the tracking of uniform motion and uniform acceleration motion in the linear motion of the target,
[0081] One method is to increase the CV and CA models at the same time, but this method of increasing the number of models will lead to model concentration and an increase in the number of models, resulting in competition among models and the dispersion of the posterior probability values of each model that plays a decision-making...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - Generate Ideas
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com