Manipulator-type endoscopic biopsy forceps
An endoscope and robotic arm technology, applied in the field of medical diagnostic instruments and equipment, can solve the problems of biopsy forceps sampling blind area, easy sampling control, etc., achieve easy control, achieve precise quantitative control, and ensure flexibility and reliability. Effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment Construction
[0036] In order to better understand the above technical solutions of the present invention, a further detailed description will be given below in conjunction with the drawings and embodiments.
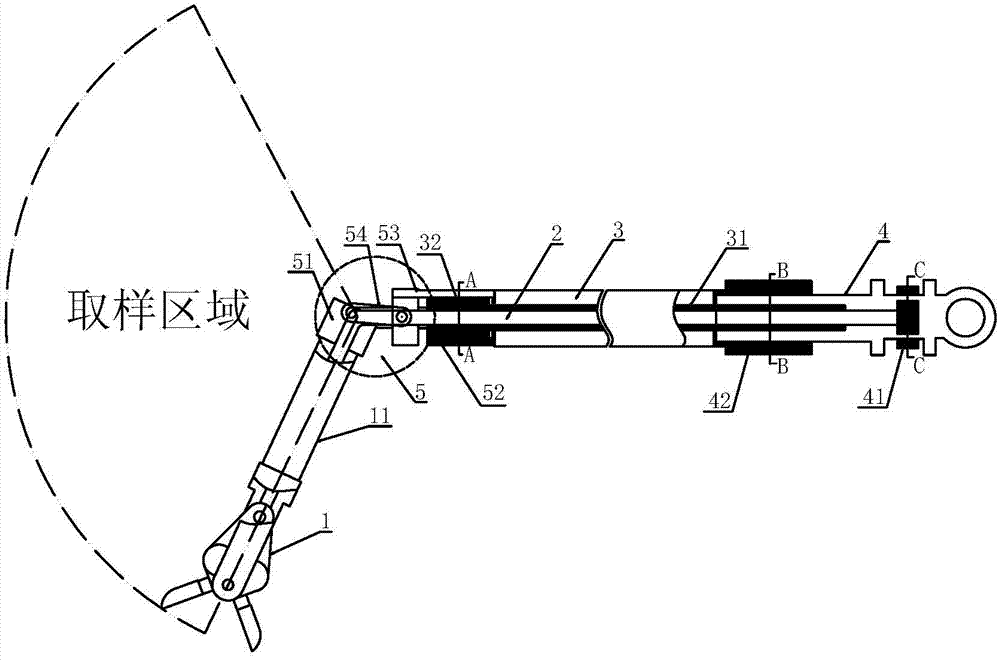
[0037] An embodiment of the mechanical arm type endoscopic biopsy forceps of the present invention is as figure 1 and figure 2 As shown, it includes the pliers head 1, the control cable 2, the flexible outer tube 3 and the operating rod 4; the pliers head operating slide handle 41 on the operating rod 4 is connected to the pliers head 1 through the control cable 2, and controls the pliers head 1 The opening and closing of the pincer head operation sliding handle 41 and the connection structure of the operating rod 4 refer to Figure 7 .
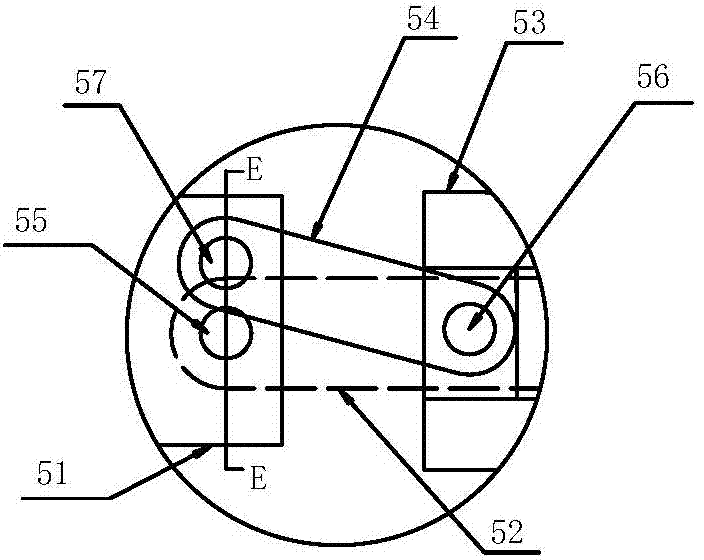
[0038] The endoscopic biopsy forceps also includes a mechanical arm composed of a swing arm joint 5 and a swing arm 11;
[0039]The swing arm joint 5 is a swing arm seat 51, a rotating base 52, a slider crank mechanism formed by a slide block 53...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com