Double-joint jumping robot
A robot and double-joint technology, applied in the field of bionic robots, can solve problems such as poor cushioning effect, insufficient jumping, poor cushioning effect, etc., and achieve the effect of good flexibility and cushioning effect, good jumping performance, and simple structure
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
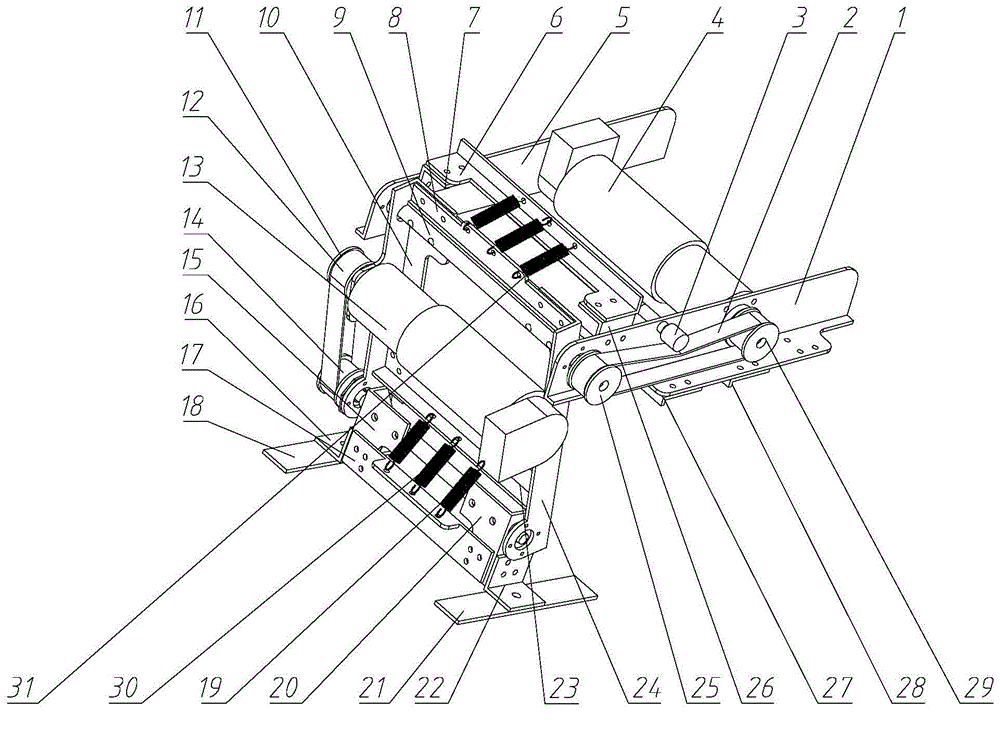
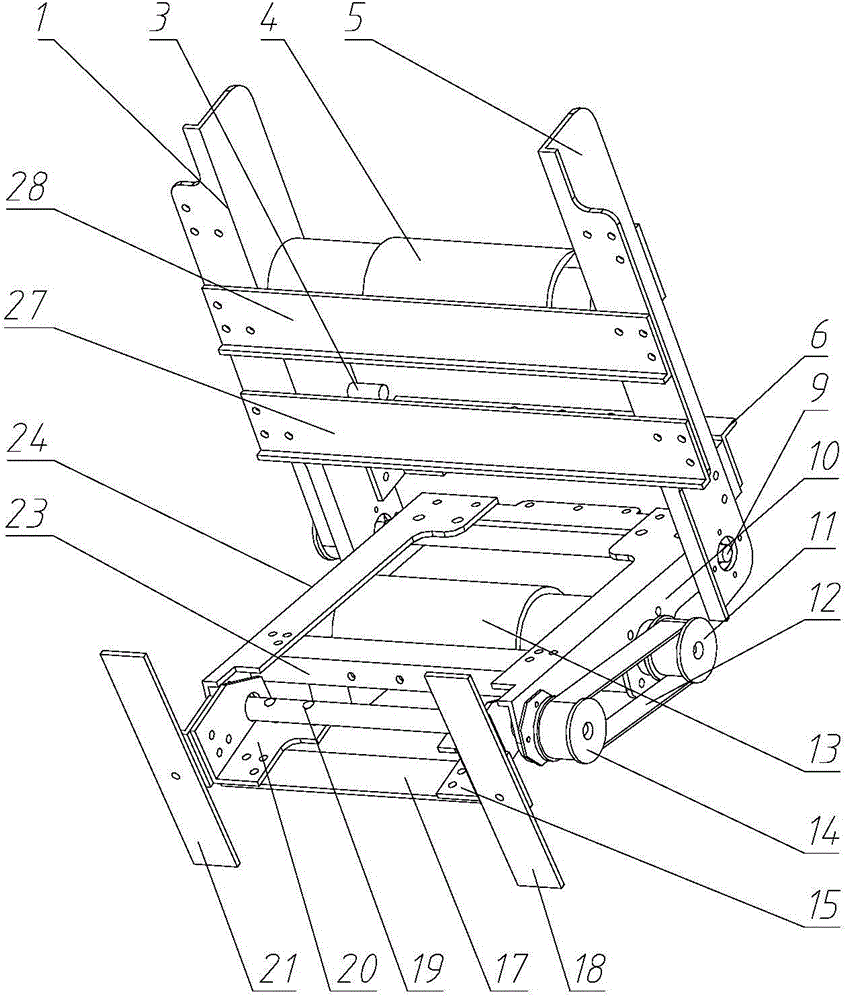
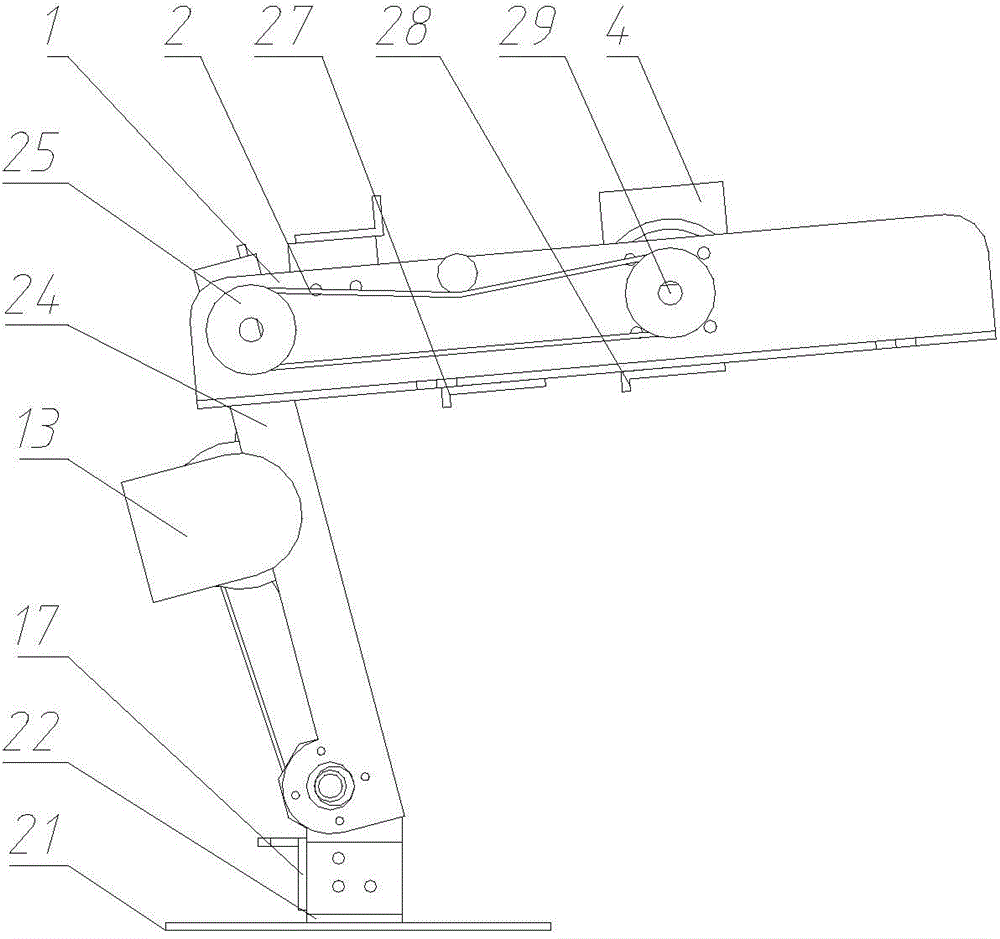
[0018] The present invention will be described in more detail below in conjunction with accompanying drawing:
[0019] The main components of the present invention include: right thigh 1, first synchronous belt 2, pressing pin 3, first motor 4, left thigh 5, first hanging spring connecting plate 6, left hanging spring supporting plate 7, second hanging spring Spring connecting plate 8, thigh shaft 9, left calf 10, first calf synchronous belt pulley 11, second synchronous belt 12, second motor 13, second calf synchronous belt pulley 14, sole left connecting plate 15, sole left supporting plate 16. The fourth hanging spring connecting plate 17, the left bottom plate 18 of the sole, the calf shaft 19, the right connecting plate 20 of the sole, the right bottom plate 21 of the sole, the right supporting plate 22 of the sole, the third hanging spring connecting plate 23, the right calf 24, the first Thigh synchronous pulley 25, right hanging spring support plate 26, the first fixed...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com