A Modeling Method of Odometer Data for Integrated Navigation Hardware-in-the-loop Simulation
A half-in-the-loop simulation and integrated navigation technology, applied in the field of odometer data modeling, can solve the problems that the integrated navigation simulation results cannot fully reflect the actual situation, the environment is complex, and the noise characteristics of the odometer cannot be fully reflected.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image



Examples
Embodiment Construction
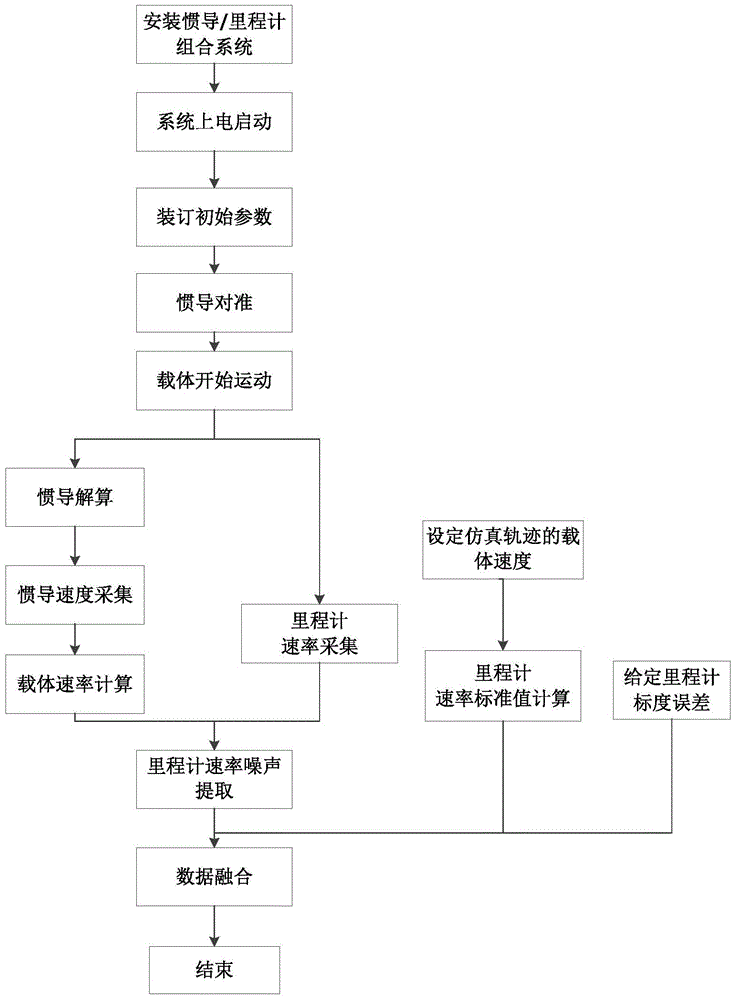
[0034] See figure 1 , figure 2 , the present invention is a kind of odometer data modeling method that is used for integrated navigation hardware-in-the-loop simulation, and the concrete steps of this method are as follows:
[0035] Step 1. Install the inertial navigation / odometer combination system on the carrier, and power it on to start.
[0036] Step 2, binding initial parameters (including initial longitude, latitude, altitude, odometer scale value) to the navigation computer.
[0037] Step 3. The carrier remains stationary, and the inertial navigation system performs static initial alignment for 5 minutes.
[0038] Step 4. After the alignment is completed, the carrier starts to move. During the movement, the inertial navigation system performs inertial navigation calculations, collects and saves the speed value output by the inertial navigation system and the speed value output by the odometer within 50 seconds after the start of movement.
[0039] Step 5. Calculate ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com